生成式推荐设计文档
xLLM 在 backend=rec 场景下提供了生成式推荐推理能力。其目标不是替代现有推荐系统,而是在保留 predictor 侧稀疏特征处理和在线服务能力的前提下,把 LLM 主体推理能力复用到推荐场景中,用于候选扩展、候选比较和最终结果生成。
本文档重点说明以下内容:
- 生成式推荐场景的目标与约束
- 推荐模型结构与推理接入方式
- 为什么推荐场景更适合固定调度和整图执行
xAttention与beam search如何围绕显存和执行效率协同优化- 当前分支中与生成式推荐相关的核心代码分布
本文档的设计目标包括:
- 用统一视角解释
backend=rec的推理链路 - 说明固定调度、整图执行和定制算子之间的关系
- 为后续技术分享、代码走读和文档扩展提供稳定底稿
本文档的非目标包括:
- 不展开推荐模型训练细节
- 不覆盖所有线上业务接入差异
- 不替代各模块的详细 API 文档
1. 背景和问题
Section titled “1. 背景和问题”最近几年,基于 LLM 的生成式推荐取得了比较明显的进展。在 xLLM 中,我们也逐步补齐了对生成式推荐推理的支持。生成式推荐的目标,不是简单把大模型能力接进推荐系统,而是希望利用生成式建模能力,在候选扩展和排序阶段提升效果,尤其是提升 CTR 这类核心指标。
在当前方案中,我们使用自研 xLLM 作为统一推理引擎,通过动态库(.so)方式接入现有预测链路:
predictor侧继续负责稀疏特征处理、样本组织和在线服务集成;xLLM侧负责完成 LLM 相关推理计算。
这样做的价值在于,推荐系统原有的工程能力可以保留,而 xLLM 在算子、KV Cache、多后端执行和调度上的基础设施也能够直接复用。
但生成式推荐和通用 LLM 推理,优化目标并不相同。
- 通用 LLM 推理更关注逐步生成的体验,例如尽快返回第一个结果、尽量缩短每一步生成之间的间隔,并允许请求在执行过程中灵活插入和提前结束;
- 生成式推荐更关注整次请求的总时延,以及在有限几轮内得到更优的候选结果。
原因很直接:推荐场景通常不是生成一段开放文本,而是在固定几轮里不断扩展候选、比较候选,最后输出更优结果。
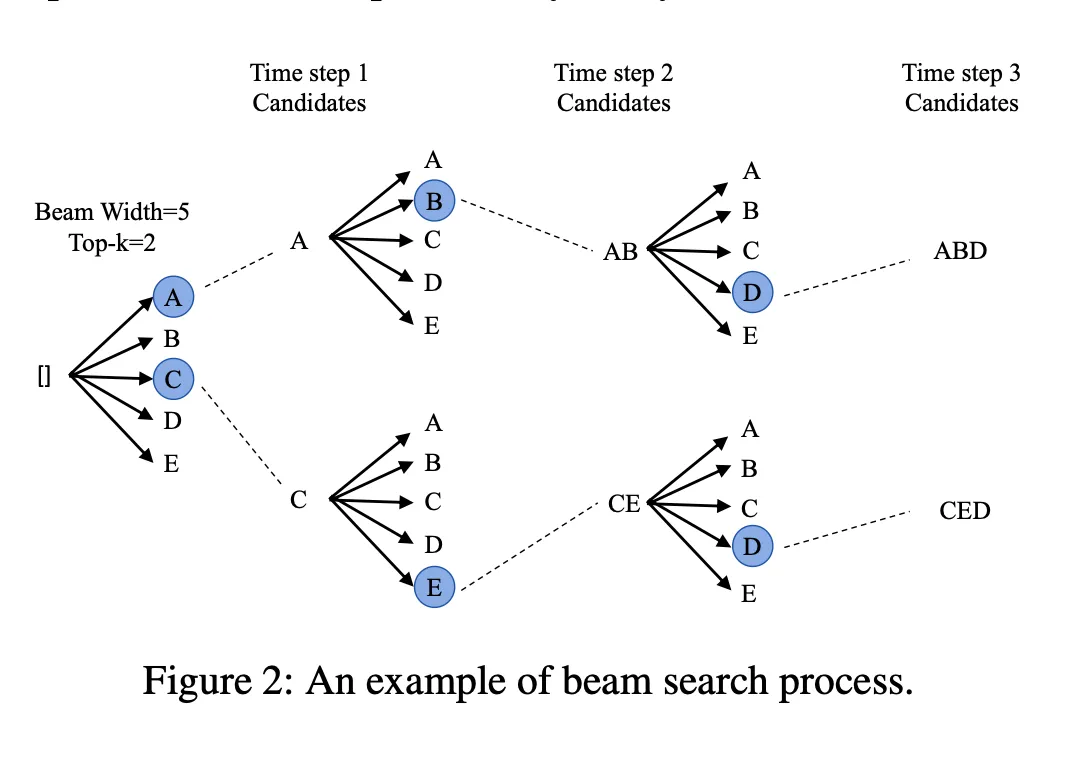
这里经常会用到 beam search。可以把它理解为:在每一轮里,不只保留当前最优的一条路径,而是同时保留多个高分候选,并在后续轮次继续扩展和比较,最后从这些候选里选出更优结果。在推荐场景里,这样做的意义不是“生成更长内容”,而是“在有限几步内覆盖更多高质量候选,提高最终推荐效果”。
因此,生成式推荐天然有两个特征:
- 固定步数推进;
- 多个候选同步比较。
也就是说,这个场景真正要优化的,不是“某一条序列先跑完”,而是“多个候选在固定几轮里稳定推进,并在每一轮完成低开销比较”。这也决定了后续的设计方向:调度层更适合使用固定调度,执行层更适合做整图执行,并在稳定执行形态上做专门的算子优化。
1.1 生成式推荐和通用 LLM 推理的 workload 差异
Section titled “1.1 生成式推荐和通用 LLM 推理的 workload 差异”如果只从“模型里也有 attention”这一点来看,生成式推荐似乎和通用 LLM 推理很接近;但从服务 workload 的角度看,两者其实差异很大。
生成式推荐更常见的输入输出形态是:
- 输入很长:因为用户历史行为、上下文特征、候选上下文往往都要进入模型;
- 输出很短:最终只需要生成固定长度的 item token 序列;
- decode 轮数固定:例如只生成 2 到 4 个 token 就结束;
- 每轮 decode 的代价不低:因为不是单路 greedy decode,而往往伴随着较大的
beam_width和top_k候选扩展。
这和通用 LLM 推理正好形成一个鲜明对照:
- 通用 LLM 推理常见的是“短 prompt + 长输出”;
- 生成式推荐常见的是“长 prompt + 短输出”。
这意味着生成式推荐并不会因为“输出很短”就自然变得便宜。相反,正因为输出阶段带着 beam search、大候选池和固定多轮比较,单步 decode 的控制和搜索成本会被放大。
1.2 这个场景最难的 3 个问题
Section titled “1.2 这个场景最难的 3 个问题”从生成式推荐服务本身的 workload 特征出发,和通用 LLM 推理相比,最值得单独拎出来的有 3 类问题。
问题一:长 prompt、短输出,但 decode 单步并不便宜
Section titled “问题一:长 prompt、短输出,但 decode 单步并不便宜”生成式推荐的 decode 轮数虽然固定且较少,但每一轮往往都要处理大规模候选比较。这和“输出短所以推理简单”的直觉不一样。
如果继续沿用通用推理系统对 decode 的组织方式,就会把大量优化空间浪费在 shared prefix 的重复加载、beam 之间的冗余 KV 访问,以及 block 粒度下的重排与复制上。
问题二:beam search 不只是搜索问题,还是系统问题
Section titled “问题二:beam search 不只是搜索问题,还是系统问题”在生成式推荐里,beam search 的作用不是语言生成里的“多样性增强”,而是核心推荐候选扩展逻辑的一部分。
一旦 beam_width 和 top_k 变大,排序、过滤、候选保活、结构复用都会成为显著成本。
也就是说,beam search 在这里不是单独一个算法模块,而是会牵动调度、显存、数据结构和 kernel 组织方式的系统级问题。
问题三:系统瓶颈不只在算子,也在 Host 与 Device 的协作方式
Section titled “问题三:系统瓶颈不只在算子,也在 Host 与 Device 的协作方式”生成式推荐通常有严格的在线时延约束,同时并发量又高。
如果 host 仍然按照“每一步都回来做判断、准备下一步、再发回设备”的方式控制整个过程,那么 host 调度和数据搬运本身就会成为显著瓶颈。
这也是为什么这个场景里不仅要优化算子,还要重构整体 pipeline,让 host 和 device 的职责划分更适合 fixed-step workload。
1.3 这篇设计文档的定位
Section titled “1.3 这篇设计文档的定位”这篇文档不会去复述外部材料,也不试图替代论文式分析。
更准确的定位是:它把生成式推荐场景里的工作负载特征、系统问题和当前分支的真实实现路径整理到同一份设计文档里,帮助后续做分享、走读和代码 review。
2. 推理架构
Section titled “2. 推理架构”2.1 模型结构介绍
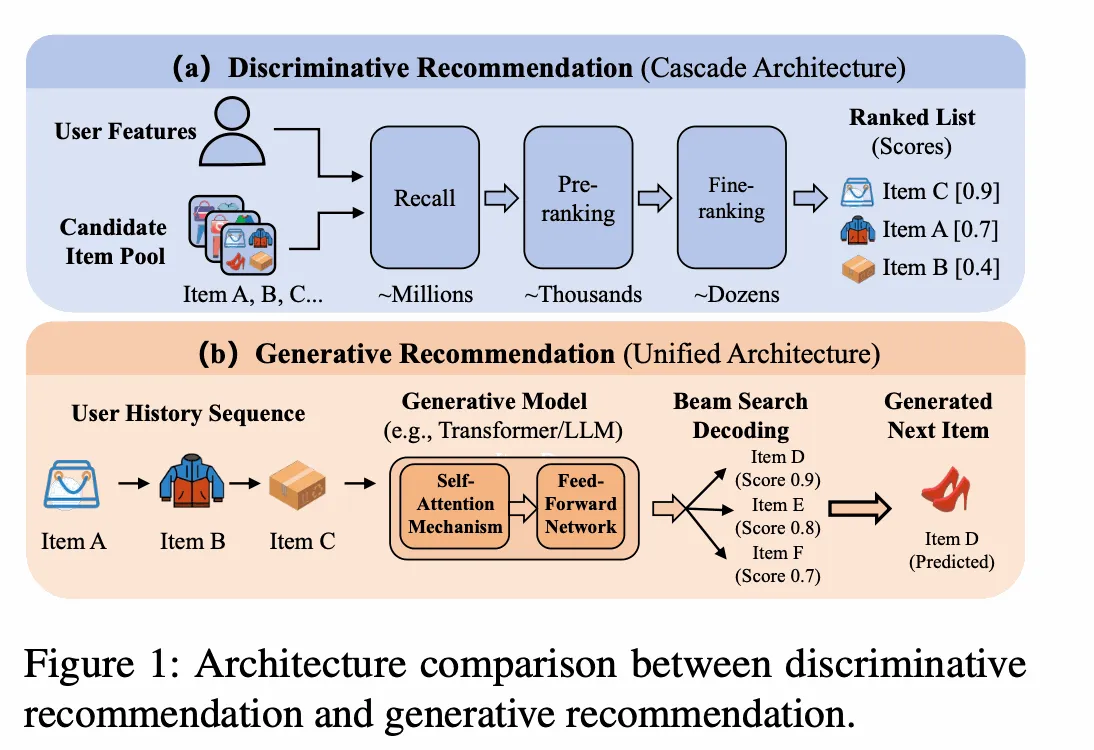
Section titled “2.1 模型结构介绍”生成式推荐是近两年推荐系统领域的重要方向。它正在打破传统“召回-排序-重排”的级联边界,把推荐任务从“判别式匹配”推进到“生成式预测”。当前文档里重点关注两类已经在线上大规模使用的模型:用于召回的 OneRec 模型,以及用于精排的 OneTrans 模型。
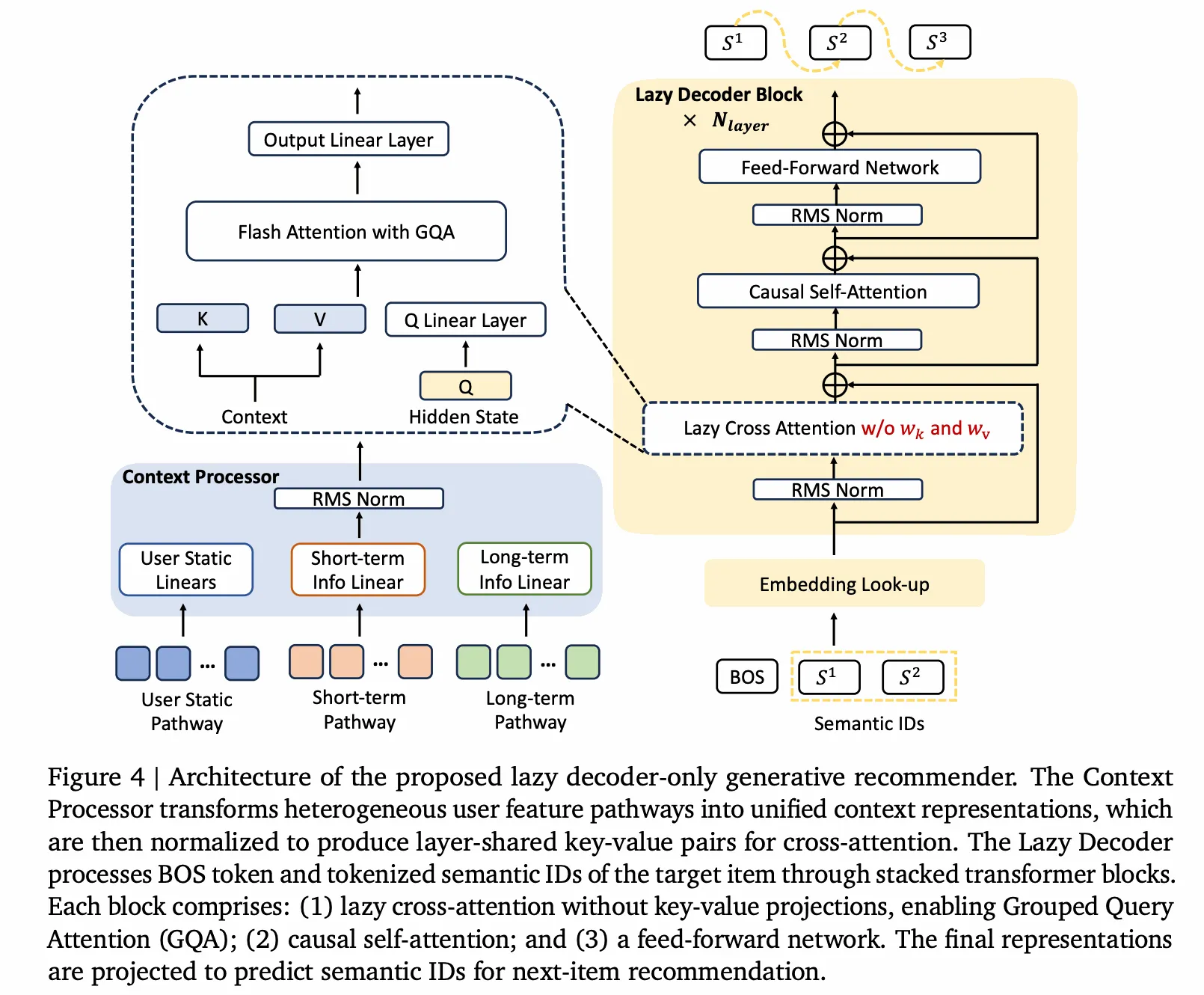
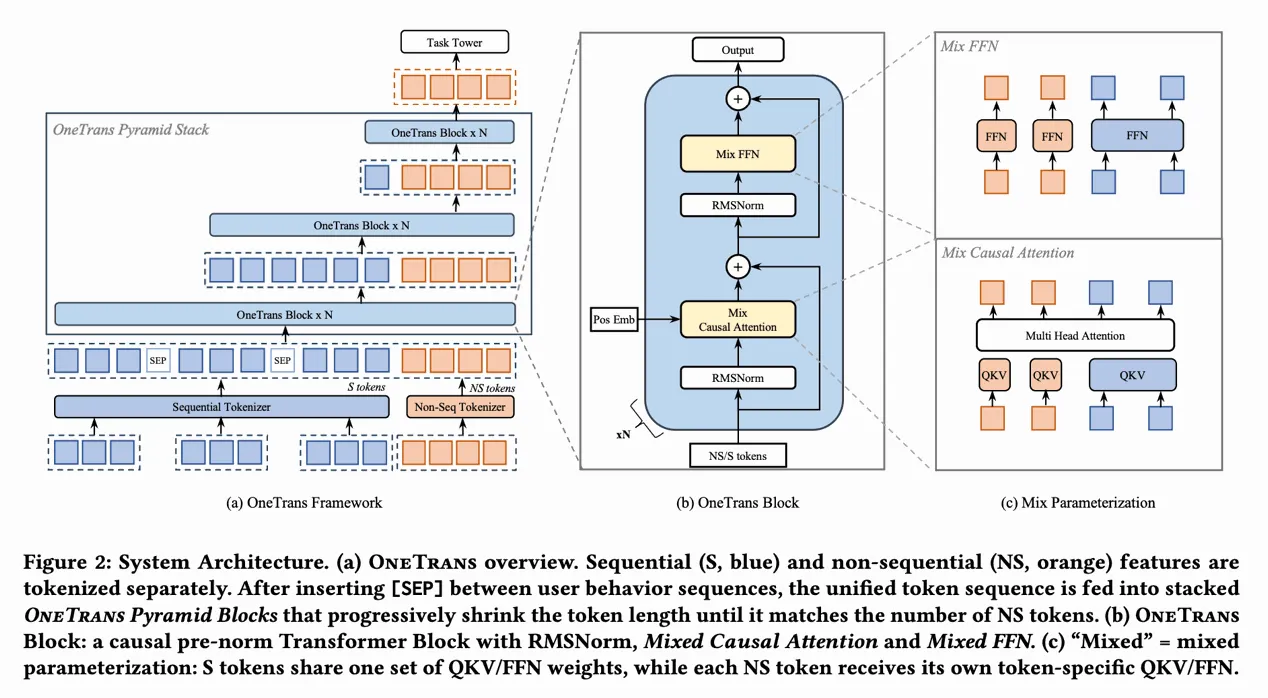
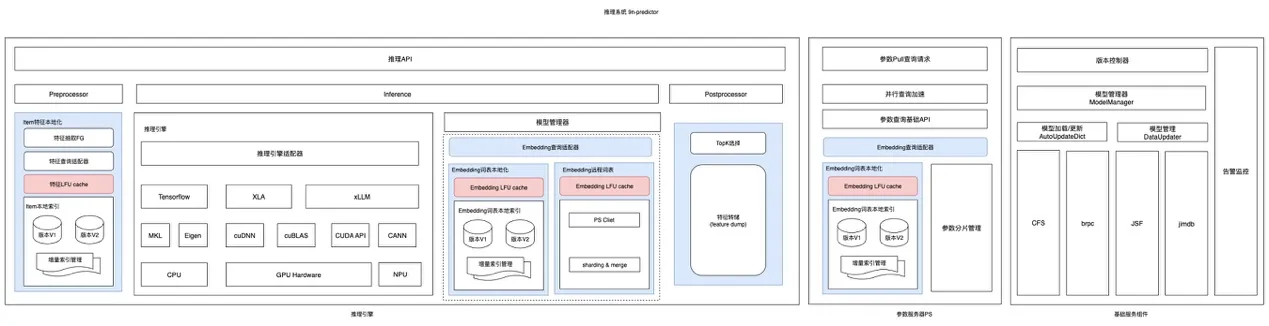
从这些模型的共同点来看,它们保留了传统 CTR 场景里的序列特征、用户静态特征和上下文特征,并由输入适配层把异构推荐信号(离散 ID、连续值、序列、多模态内容)统一映射为 LLM Decoder 可理解的嵌入表示(embedding),必要时再与 LLM 的词表嵌入空间对齐。模型主体则是 LLM 的 Encoder+Decoder 或 Decoder-only 结构,因此不同部分需要不同的推理引擎承接。
2.2 推理架构介绍
Section titled “2.2 推理架构介绍”根据模型结构特点,当前方案把模型切成两类子图:
- 输入适配层仍然归属于传统 CTR 推理范畴,由
predictor承接; - LLM 主体部分由 xLLM 承接。
作为 LLM 推理的核心引擎,xLLM 在生成式推荐场景下提供了两种接入方式:RPC 接入与动态库(.so)接入。
2.2.1 RPC 接入方式
Section titled “2.2.1 RPC 接入方式”当前营销等在线召回场景的生成式推荐主要采用 RPC 方式接入。它的优点是服务边界清晰、接入方式稳定,但也会引入额外的 RPC 调用开销。
2.2.2 动态库接入方式
Section titled “2.2.2 动态库接入方式”另一种方式是把 xLLM 作为 predictor 内部的独立推理引擎,对模型中属于 LLM 主体的子图直接做推理。这样可以省掉 RPC 往返开销,后续更适合承接需要低延迟的相关业务。
3. 固定调度与整图执行
Section titled “3. 固定调度与整图执行”3.1 固定步数调度
Section titled “3.1 固定步数调度”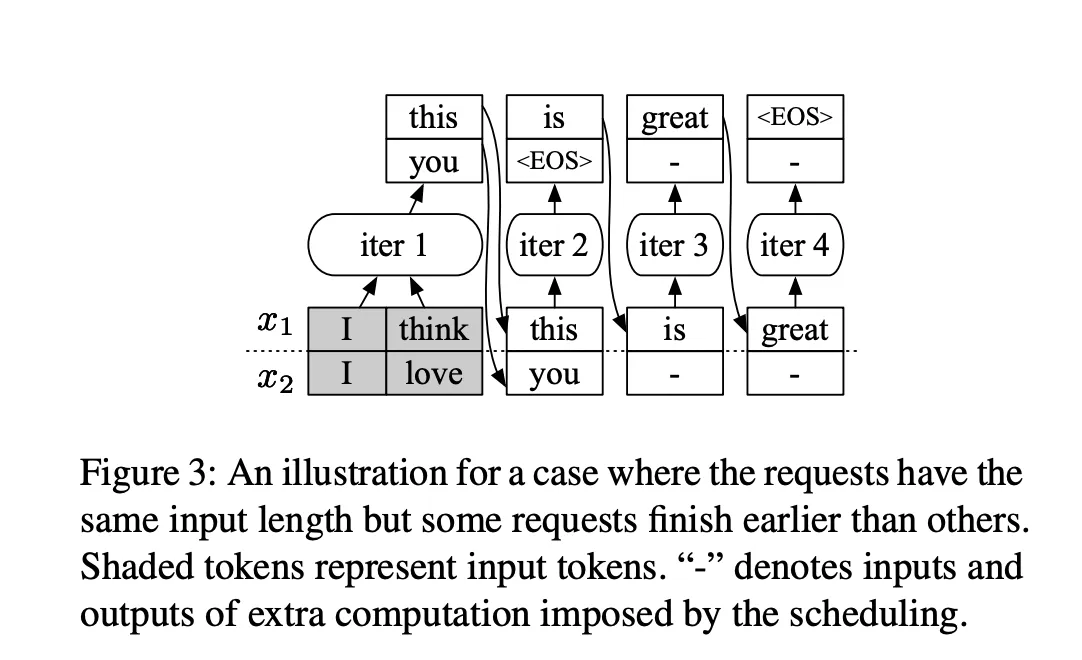
上图来自论文《Orca: A Distributed Serving System for Transformer-Based Generative Models》,它介绍了 continuous batching 的背景:通过动态重组 batch,避免固定 batch 调度导致算力空转。
但生成式推荐是固定步数的,这一点改变了调度问题本身。从调度角度看,生成式推荐更适合 fixed_steps_scheduler,而不是 continuous batching。原因不只是“固定步数所以固定调度”,而是因为这个场景本身就是按固定几轮来组织计算的。既然请求通常会在约定好的几步里完成,而且多个候选需要同步向前推进,那么调度器最重要的任务就不是“随时插队、随时清退”,而是“把这一组候选稳定地发出去,并尽量减少额外调度动作”。
fixed_steps_scheduler 的第一个好处,是更适合 beam search。在 decode 阶段,beam width 往往比较大,我们希望多个 beam 在同一轮里一起推进、一起比较。如果采用连续调度,那么每一步都可能触发 batch 重组、sequence 压缩、索引重排和状态裁剪。这些动作在通用 LLM 推理里是合理的,因为请求确实会动态结束;但在生成式推荐里,它们很多时候并不是收益,而是额外成本。使用固定调度之后,同一个请求下的多个 beam 可以在固定窗口里齐头并进,调度器不需要每一步都重新组织 batch,也不需要反复判断哪些序列该保留、哪些序列该剔除。这样做可以明显减少调度层的控制开销。
第二个好处,是执行形态会更稳定。一旦解码轮数固定、beam group 规模固定、推进节奏固定,很多后续优化才真正有了基础。比如 buffer 可以提前分配,workspace 更容易复用,cache 访问模式也更规整。对于性能优化来说,这种稳定性很重要,因为它意味着更容易做 profiling、更容易做容量规划,也更容易把执行链路固化下来。换句话说,fixed_steps_scheduler 解决的是调度稳定性问题,它让执行入口从动态、不规则、频繁变化的状态,收敛成了一个稳定的固定窗口。
第三个好处,是它减少了很多与模型计算无关的损耗。在推荐场景里,主要成本本来应该集中在真正的候选扩展、注意力计算和 beam 比较上;但如果每一步都让调度器参与 sequence 重排、batch 重组、元数据更新和索引搬运,那么会引入不少“不是算子本身、但又必须付出”的额外成本。从这个角度看,固定调度本质上是在用更强的执行确定性,换更高的吞吐、更低的调度成本以及更稳定的运行时行为。
当然,固定调度也有代价。最明显的问题就是,新请求的等待时间会变长。因为连续调度的一个优势,是新请求可能等一步就有机会被插入;而固定调度下,新请求通常要等当前这一轮固定窗口结束,才能进入下一轮执行。这会带来更明显的排队等待。这个问题的缓解方向,不是退回到连续调度,而是引入 multi-stream。也就是说,把已经在固定窗口里的大批请求和新接入的小批请求尽量解耦,让它们落在不同 stream 或不同执行通道上。这样做的目的,不是完全消除等待,而是在保住固定调度吞吐优势的同时,降低新请求接入的额外时延。
3.2 整图执行
Section titled “3.2 整图执行”在这个基础上,multi_step_pipeline 就成为固定调度的天然配套设计。它解决的是执行效率问题。既然我们已经知道这个场景本身就是固定几步,而且通常不会提前结束,那么就没有必要每一步都让 host 参与一次控制:没有必要每一步都做一次 D2H 去判断“这一批是不是结束了”,也没有必要每一步都再做一次 H2D 去准备下一轮输入。更高效的做法,是在第一步启动时,就把后续若干步需要用到的空间、索引和数据结构一次性准备好,然后让 device 侧连续向前推进。
这样做的收益非常直接:
- 减少
D2H/H2D往返,降低 host 参与频率; - 减少每一步的 launch 和控制开销;
- 让更多中间数据停留在 device 侧,提高数据复用效率;
- 让整段执行过程更像一条连续流水,而不是“每一步停一下、准备一下、再继续”。
对于生成式推荐这种固定轮数任务来说,这种连续执行方式明显比逐步回到 host 再下发下一轮更高效。
multi_step_pipeline 还有一个经常被低估的价值,就是它为定制算子创造了更好的运行条件。在执行形态稳定之后,配合定制算子把关键热路径进一步做快。fixed step 解决的是调度稳定性,而整图执行加上算子定制,解决的是执行效率。
4. 显存管理与算子协同优化
Section titled “4. 显存管理与算子协同优化”4.1 计算与显存瓶颈
Section titled “4.1 计算与显存瓶颈”4.1.1 模型输入输出特征
Section titled “4.1.1 模型输入输出特征”在当前生成式推荐推理设定中,item id 由固定长度 token 序列表示,因此 decode_step 是已知的小常数(例如 3)。一次请求的推理流程可以概括为:
- 一次 prefill:输入为长序列,即用户历史上下文;
decode_step次 decode:每步生成 1 个 token,最终组合为 item id。
单步 decode 的单位开销并不低。为了召回与多样性,生成式推荐通常需要较大的 beam_width;同时每条 beam 还要扩展 top_k 个候选,再在全局候选池 beam_width × top_k 上选择新的 beam 集合,最终 beam 集合大小仍保持为 beam_width。例如当 beam_width=512、top_k=512 时,单步候选池大小达到 262144(约 2.6×10^5)。因此 decode 的步数虽然不多,但每步的搜索选择与 KV 访问开销仍然不低。
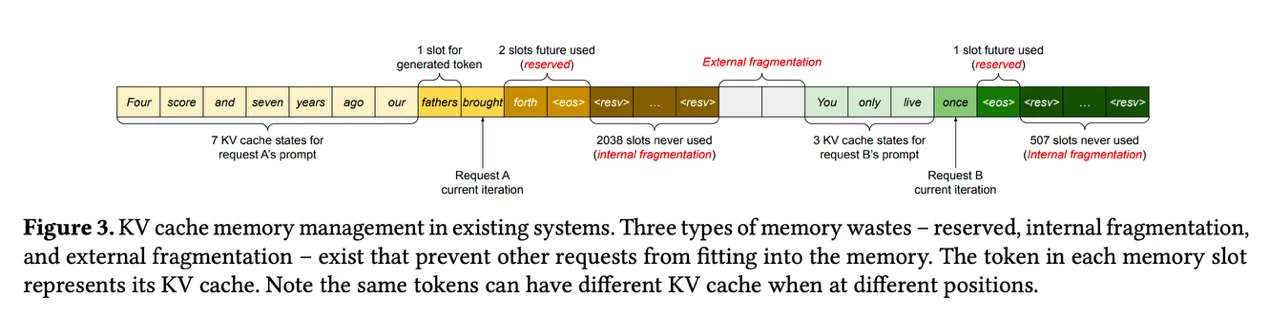
4.1.2 存储冗余与显存碎片
Section titled “4.1.2 存储冗余与显存碎片”生成式推荐推理服务的主要瓶颈可以拆成两类,而 xAttention 就是围绕这两类问题来设计的。
第一类是 Attention 的冗余带宽消耗:shared prefix 没有被显式建模为可复用结构。在较大的 beam 场景下,所有 beam 都共享同一段长 prompt,但通用实现往往以“每条 beam 一条完整序列”的视角组织 KV,导致 Shared KV 在 beam 维度被重复触发加载,attention kernel 的有效算术强度下降,最终受限于 HBM 带宽。
第二类是 KV Cache 的复制与碎片:beam 分叉与 block 级管理之间存在结构性冲突。beam search 会频繁 fork 与 retire,并触发 beam 重排。对于基于 block 的 KV 管理(例如 PagedAttention 一类),“重排 + block 对齐”往往意味着 block copy、碎片化以及额外空间浪费,显存和带宽都会被放大。
4.2 xAttention 设计原理
Section titled “4.2 xAttention 设计原理”4.2.1 KV Cache 存储优化
Section titled “4.2.1 KV Cache 存储优化”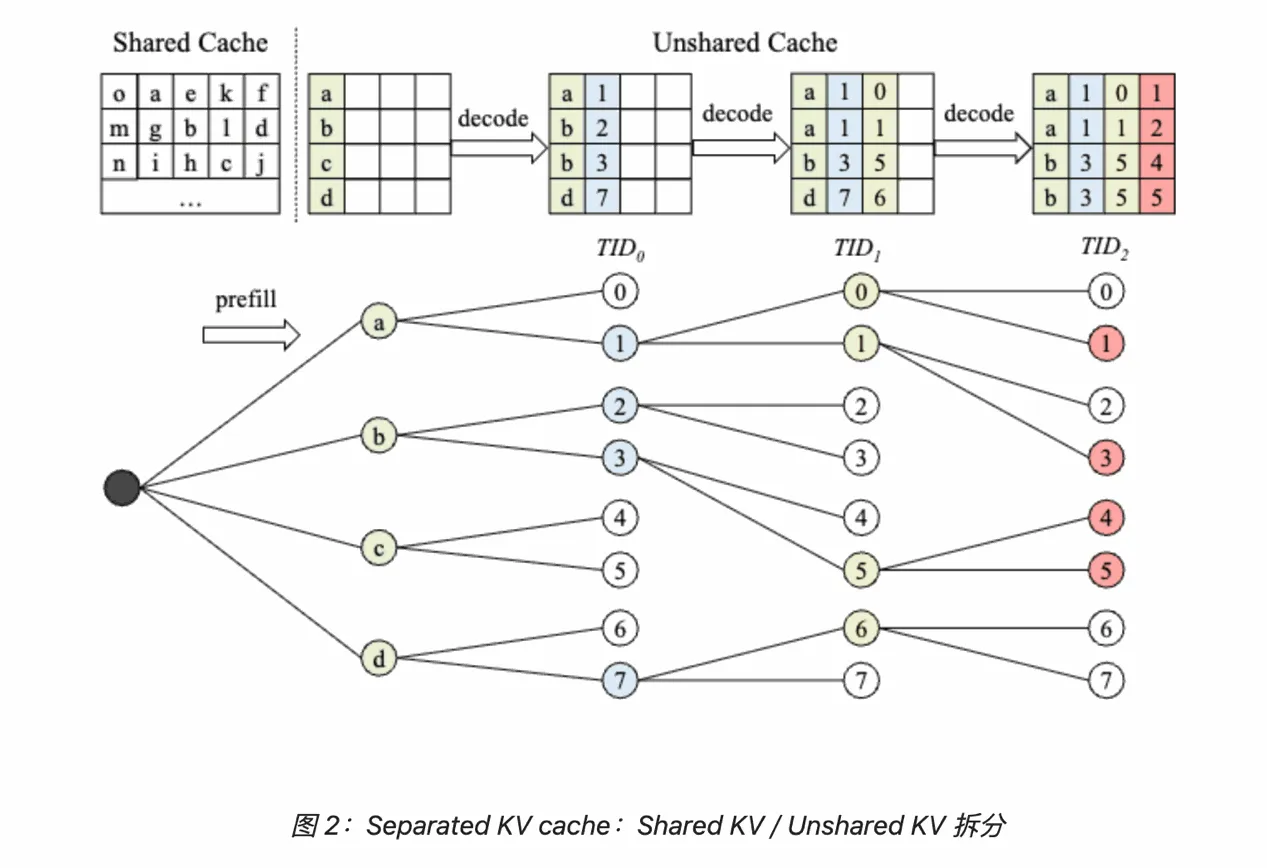
围绕当前生成式推荐推理的固定结构,xAttention 把 KV Cache 的组织方式与 attention 计算和并行策略一起重新设计,将 shared prefix 在显存层面只存一份,同时 beam 的分叉与重排不再触发高代价的数据拷贝。
首先,KV Cache 被按“是否共享前缀”拆成两类:
- Shared KV:prefill 阶段生成的 prompt KV,所有 beam 共享同一份物理存储;
- Unshared KV:decode 阶段每条 beam 新生成 token 的 KV,按 token 粒度管理。
拆成两类 KV 之后,Unshared KV 只存储 decode 阶段产生的新 token,从而避免 block copy 与显存浪费。
4.2.2 Attention 计算优化
Section titled “4.2.2 Attention 计算优化”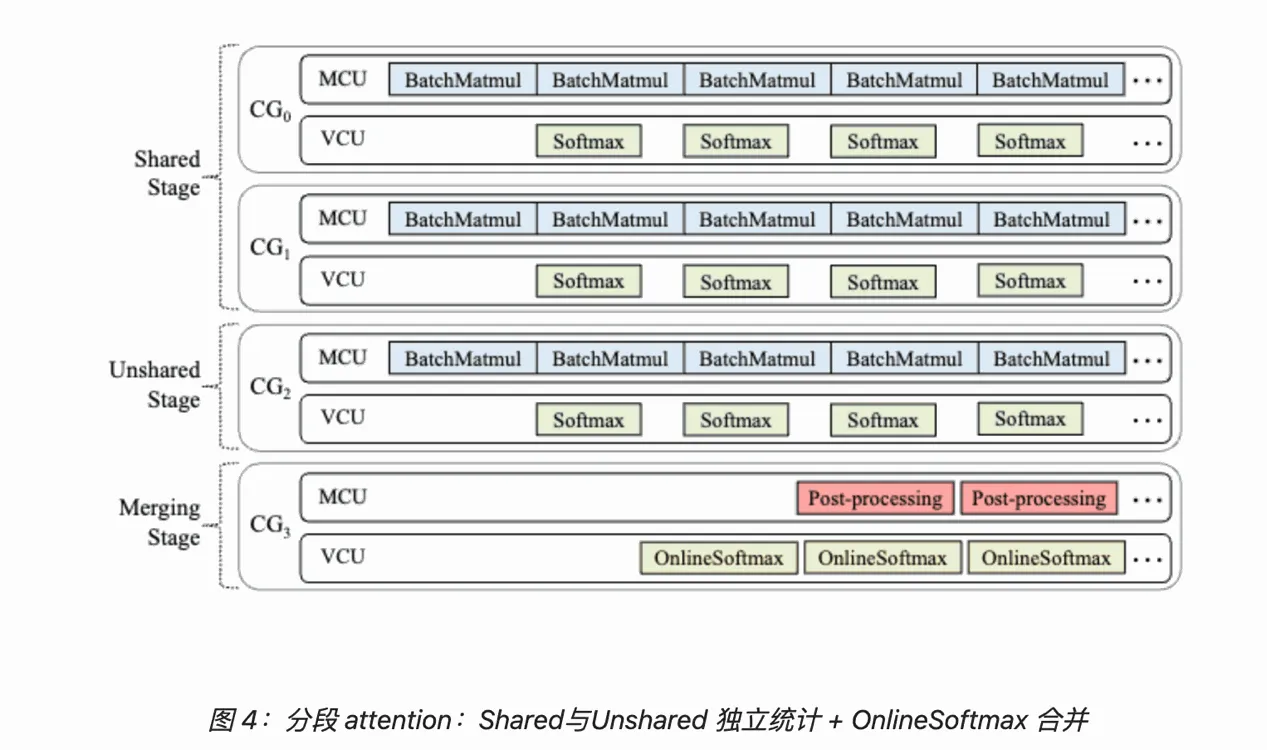
为了避免把 Shared 与 Unshared KV 直接拼接成一个逻辑长序列,以及由此带来的访存与拷贝问题,xAttention 把一次 attention 拆成三个阶段:
- shared stage:仅对 Shared KV 计算局部 softmax 统计量与部分输出;
- unshared stage:仅对 Unshared KV 计算局部统计量与部分输出;
- merge stage:使用 OnlineSoftmax 把两段结果稳定合并。
并行化层面,会把 shared、unshared 与 merge 分配到不同执行单元和队列中形成流水线,目标是让 Shared 与 Unshared 的计算尽量重叠执行,同时把同步点压缩到最少。
4.3 Beam Search 的系统化处理
Section titled “4.3 Beam Search 的系统化处理”如果说 xAttention 解决的是“attention 如何更省显存、更少重复读取 Shared KV”,那么这一节解决的就是“在大候选池下,beam search 怎么避免把时间浪费在无效比较和无谓排序上”。
从系统视角看,beam search 在生成式推荐场景里至少包含下面几层成本:
- 每一步要从大量候选中选出新的 beam 集合;
- 候选里并不是每个 token 组合都代表真实 item;
- 随着 decode 往前推进,旧候选会被淘汰,新候选会不断产生;
- 如果每次都新建数据结构、全量排序、全量过滤,开销会非常高。
因此,这一层更适合被理解成“围绕 beam search 的系统优化”,而不是单纯一个排序 kernel。
它的目标包括:
- 尽早终止不必要的排序;
- 在 item 空间约束下尽早过滤无效路径;
- 尽量复用已有数据结构,避免每轮反复创建和销毁候选容器。
对于技术分享来说,这一节最值得强调的是:
在生成式推荐里,beam search 的代价不是附属成本,而是 decode 主成本的一部分。也正因为如此,beam search 需要和 fixed-step 调度、multi-step 执行、KV cache 组织一起被系统性考虑。
4.4 多级流水线和多流并发
Section titled “4.4 多级流水线和多流并发”第三类问题不是某个单点算子慢,而是整个 pipeline 的分层协作方式不够适合生成式推荐。
在当前设计里,这一节关注的是一类系统层优化思想:如何让 host、engine、worker、算子执行之间尽量重叠。
它至少包含 3 层含义:
-
Host 与 Device 的分工更清晰
- host 尽量少做每轮控制
- device 尽量多做连续多轮执行
-
执行链路尽量流水化
- 当前轮执行时,下一轮输入准备已经开始
- scheduler、batch builder、worker 之间尽量减少停顿
-
利用多流与多并发 pipeline 缓解等待
- 固定窗口会带来等待代价
- 但可以通过
multi-stream或多套执行 pipeline 把这部分代价摊薄
因此,这一节讨论的可以理解为:把 fixed-step 场景下的调度稳定性、设备侧连续执行,以及多流并发能力组合起来的系统层设计。
4.5 为什么这条设计路线值得做
Section titled “4.5 为什么这条设计路线值得做”从生成式推荐服务的 workload 特征来看,把它单独当成一种特殊服务路径来设计调度、执行和算子,并不是“过度工程化”,而是有明确收益空间的。
原因在于,这个场景同时具备几种在通用 LLM 推理中不常同时出现的特征:
- 输入长,但输出短;
- decode 轮数固定,但单轮成本高;
beam_width和候选池规模都不小;- host 参与、batch 重排和数据搬运很容易放大整体时延。
所以,只要沿用通用推理路径,很多系统成本就会被保留下来;而一旦把 fixed-step、multi-step、shared/unshared KV、beam search 和多流执行放到一起设计,收益就会从多个层次同时出现:调度成本下降、host 参与变少、显存组织更合理、热路径更适合做定制算子优化。
所以在技术分享里,这一节可以作为一个很好的收口:
我们不是因为“fixed step 听起来合理”才这样做,而是因为生成式推荐在系统层面确实和通用 LLM 推理不一样,这样做能换来更高吞吐和更稳定的低时延表现。
5. 代码结构
Section titled “5. 代码结构”当前分支里,生成式推荐相关代码可以按下面的结构理解:
外部接入:
xllm/c_api/rec.hxllm/c_api/internal/rec.cppxllm/c_api/examples/simple_rec_completions.cpp
服务入口:
xllm/api_service/rec_completion_service_impl.cppxllm/api_service/chat_service_impl.cppxllm/api_service/api_service.cppxllm/api_service/api_service.h
调度与引擎:
xllm/core/distributed_runtime/rec_master.cppxllm/core/distributed_runtime/rec_master.hxllm/core/scheduler/fixed_steps_scheduler.cppxllm/core/scheduler/fixed_steps_scheduler.hxllm/core/distributed_runtime/rec_engine.cppxllm/core/distributed_runtime/rec_engine.h
batch / request / proto:
xllm/core/framework/batch/rec_batch_input_builder.cppxllm/core/framework/batch/rec_batch_input_builder.hxllm/core/framework/batch/rec_multi_round_batch_input_builder.cppxllm/core/framework/batch/rec_multi_round_batch_input_builder.hxllm/core/framework/request/rec_type.hxllm/proto/rec.protoxllm/proto/completion.protoxllm/proto/xllm_service.proto
runtime / worker:
xllm/core/runtime/rec_worker_impl.cppxllm/core/runtime/rec_worker_impl.h
kernel / 算子热路径:
xllm/core/layers/cuda/xattention.cppxllm/core/layers/cuda/flashinfer_attention.cppxllm/core/kernels/cuda/xattention/beam_search.cppxllm/core/kernels/cuda/xattention/cache_select.cu
6. 当前分支的执行主链
Section titled “6. 当前分支的执行主链”为了把设计和实现真正对起来,可以把当前分支的主执行链拆成下面几步来理解:
-
外部接入
- 如果走动态库方式,请求会从
xllm/c_api/internal/rec.cpp中的xllm_rec_text_completions、xllm_rec_token_completions或xllm_rec_chat_completions进入。 - 如果走服务方式,请求会从
xllm/api_service/rec_completion_service_impl.cpp或chat_service_impl.cpp进入,再转到RecMaster。
- 如果走动态库方式,请求会从
-
请求进入
RecMasterRecMaster负责把 prompt、token ids、raw embedding 等不同入口统一收敛到 request 构造逻辑。- 在这里会根据模型类型区分
kOneRec和kLlmRec,并选择不同的 request pipeline。
-
进入固定调度
RecMaster在初始化时直接创建FixedStepsScheduler。- 调度器不再按“每一步都动态重排 batch”的思路工作,而是优先围绕固定轮数和固定候选组去构造 batch。
-
引擎执行
RecEngine再根据RecPipelineType选择执行路径。- 对
LlmRecmulti-round 场景,会下沉到RecMultiRoundEnginePipeline,把多轮 decode 的主要控制逻辑继续往 worker 侧下压。
-
batch 与输入拼装
RecBatchInputBuilder和RecMultiRoundBatchInputBuilder负责把 sequence、step 信息、decode positions、sampling params 等整理成ForwardInput。- 这里的
step_meta是 multi-step 执行的关键数据来源,它决定后续每一轮 decode 该如何构造位置、cache 和 beam 相关输入。
-
worker 侧多轮执行
RecWorkerImpl::LlmRecMultiRoundPipeline::step()会在设备侧循环多轮。- 它会先准备 beam search tensor、full/unshared KV 相关结构,再在每一轮中执行:
- 当前轮输入准备
- 模型 forward
- sample 输出处理
- beam search
- cache select
- 下一轮输入预计算
-
算子热路径
- Attention 相关路径落在
xattention.cpp与flashinfer_attention.cpp - beam 相关路径落在
beam_search.cpp - beam 重排后的 cache 选择路径落在
cache_select.cu
- Attention 相关路径落在
如果从技术分享视角来讲,这条主链非常适合作为“架构总图”之后的第一条展开线,因为它把“固定调度、整图执行、定制算子”三件事串成了一个具体执行过程,而不是三个割裂的优化点。
7. 设计取舍与适用边界
Section titled “7. 设计取舍与适用边界”这套设计并不意味着固定调度一定优于连续调度,也不意味着 multi-step pipeline 适合所有生成任务。它成立的前提,是当前生成式推荐场景具有下面几个特征:
- decode 轮数较固定,通常不会像开放式文本生成那样提前结束;
- 同一请求下存在较大的
beam_width,而且多个 beam 需要同步比较; - 整次请求的总时延,比逐 token 的交互体验更重要;
- 设备侧状态(KV Cache、positions、beam tensors)可以提前组织并稳定复用。
在这些前提成立时,固定调度和整图执行的收益会比较明显。但它也有明确边界:
7.1 固定调度的边界
Section titled “7.1 固定调度的边界”- 如果请求长度差异极大,而且大量请求会提前结束,那么连续调度的灵活性会更有价值;
- 如果业务更关心“新请求能不能立刻插入”,而不是“当前窗口吞吐是否最优”,固定调度会天然吃亏;
- 如果候选扩展不依赖大规模 beam 同步推进,那么固定窗口的收益会下降。
7.2 multi-step pipeline 的边界
Section titled “7.2 multi-step pipeline 的边界”- 如果每一步都必须回到 host 做强控制决策,那么 multi-step pipeline 的优势会被削弱;
- 如果 shape、batch 或关键输入在每一轮都大幅波动,那么想要把多轮执行稳定下来会更难;
- 如果后端算子本身还不支持稳定的多轮设备侧推进,那么整图执行只会停留在概念层。
7.3 定制算子的边界
Section titled “7.3 定制算子的边界”xAttention 和 beam search 定制算子之所以值得做,是因为当前执行形态已经足够稳定。如果没有 fixed-step 带来的稳定 batch 形态,也没有 multi-step pipeline 带来的稳定多轮推进,那么很多定制优化都会被反复的数据搬运、batch 重组和 host 参与开销抵消掉。
因此,更合理的理解顺序不是“先有定制算子,再决定调度”,而是:
- 先确认 workload 适合固定调度;
- 再确认多轮执行可以尽可能下沉到设备侧;
- 最后再围绕真正稳定下来的热路径做算子定制。
这样才能让 fixed_steps_scheduler、multi_step_pipeline、xAttention 和 beam search 四者形成一套前后自洽的设计,而不是彼此孤立的优化点。
8. 代码路径附录
Section titled “8. 代码路径附录”这一节的目的,不是重复“代码结构”里的文件清单,而是给读者一个更可执行的阅读顺序:如果后续要继续做技术分享、走读代码,或者排查 backend=rec 路径上的行为差异,可以直接按下面的顺序进入。
8.1 从外部入口开始看
Section titled “8.1 从外部入口开始看”如果要理解 predictor 或动态库接入是怎样进入 xLLM 的,建议先看下面几处:
xllm/c_api/rec.h- 对外暴露
xllm_rec_create、xllm_rec_initialize、xllm_rec_text_completions、xllm_rec_token_completions、xllm_rec_chat_completions - 适合先理解“外部系统到底能怎么调用 REC 能力”
- 对外暴露
xllm/c_api/internal/rec.cpp- 这是真正的 CAPI 实现
- 适合看
.so模式下,request 参数是怎样被封装和转发的
xllm/c_api/examples/simple_rec_completions.cpp- 是最短的调用示例
- 如果要给新人解释“动态库接入长什么样”,这里最直观
如果技术分享里想给一段“最小调用样例”,这一层最适合出现在开头。
8.2 从服务入口看统一分发
Section titled “8.2 从服务入口看统一分发”如果你更关心 RPC 或统一服务链路,可以继续看:
xllm/api_service/api_service.cpp- 这里会根据
FLAGS_backend决定挂哪类 service impl backend == "rec"时,rec_completion_service_impl_和chat_service_impl_都会被接上
- 这里会根据
xllm/api_service/rec_completion_service_impl.cpp- 负责把 rec completion 请求转给
RecMaster routing、input_tensors、RequestParams都是在这里被整理进来
- 负责把 rec completion 请求转给
xllm/api_service/chat_service_impl.cpp- 对
RecMaster也有 chat 入口 - 适合说明“REC 不是只有 token completion,一样可以走 chat 形态”
- 对
这一层适合在技术分享中回答一个问题:为什么说 backend=rec 不是另起炉灶,而是接进了现有服务框架。
8.3 从调度和引擎看主链
Section titled “8.3 从调度和引擎看主链”如果分享的重点是“为什么 fixed step 更适合 rec”,阅读顺序建议是:
xllm/core/distributed_runtime/rec_master.hxllm/core/distributed_runtime/rec_master.cppxllm/core/scheduler/fixed_steps_scheduler.hxllm/core/scheduler/fixed_steps_scheduler.cppxllm/core/distributed_runtime/rec_engine.hxllm/core/distributed_runtime/rec_engine.cpp
可以按下面这条链理解:
Rec request -> RecMaster -> FixedStepsScheduler -> RecEngine -> RecEnginePipeline -> Worker / worker_clients这里最值得讲的几个点是:
RecMaster负责入口收敛和 pipeline 选择FixedStepsScheduler负责把 request 组织成适合固定轮数推进的 batchRecEngine负责把调度结果交给实际执行路径RecMultiRoundEnginePipeline代表“多轮 decode 控制进一步下沉”的实现方式
如果分享时要强调“fixed step 不是口头概念,而是代码主链的真实选择”,这一层就是核心证据。
8.4 从 batch builder 看 multi-step 的输入组织
Section titled “8.4 从 batch builder 看 multi-step 的输入组织”如果要解释 multi_step_pipeline 为什么能成立,单看 scheduler 还不够,必须继续看 batch builder:
xllm/core/framework/batch/rec_batch_input_builder.hxllm/core/framework/batch/rec_batch_input_builder.cppxllm/core/framework/batch/rec_multi_round_batch_input_builder.hxllm/core/framework/batch/rec_multi_round_batch_input_builder.cppxllm/core/framework/batch/batch.cpp
这里最重要的不是“类名”,而是几个关键事实:
RecBatchInputBuilder::create(...)会按RecType和 multi-round 模式选择 builderRecMultiRoundBatchInputBuilder不是普通 builder 的轻微变种,而是专门为多轮 decode 组织输入的实现step_meta、decode_positions、sampling params、batch forward type等信息是在这一层被拼好并送往后续 runtime 的
所以,如果要说明“为什么第一步就能把后面几步的输入准备好”,这一层比只讲 engine 更关键。
8.5 从 worker 看 device 侧多轮执行
Section titled “8.5 从 worker 看 device 侧多轮执行”multi_step_pipeline 真正最值得展开的代码在:
xllm/core/runtime/rec_worker_impl.hxllm/core/runtime/rec_worker_impl.cpp
尤其是下面这些点:
RecWorkerImpl::step_async(...)- 说明请求是如何进到 worker 内部并在特定 stream 上执行的
RecWorkerImpl::LlmRecMultiRoundPipeline::prepare_inputs(...)- 说明 multi-round 输入如何进入 runtime
RecWorkerImpl::LlmRecMultiRoundPipeline::allocate_kv_caches_related()- 说明为什么 fixed-step 场景更适合提前分配 KV 相关结构
RecWorkerImpl::LlmRecMultiRoundPipeline::step(...)- 这是最核心的一段
- 明确展示了多轮循环、beam search、cache select、下一轮输入预计算之间的关系
compute_next_round_input_async(...)- 这是解释“为什么可以减少 host 往返”的关键点
如果技术分享想从“执行效率”而不是“调度策略”切入,这一层是最值得重点展开的。
8.6 从 kernel 热路径看为什么定制算子值得做
Section titled “8.6 从 kernel 热路径看为什么定制算子值得做”如果要讲 xAttention 和 beam search 定制算子,推荐按下面的顺序进:
xllm/core/layers/cuda/xattention.cppxllm/core/layers/cuda/flashinfer_attention.cppxllm/core/kernels/cuda/xattention/xattention_ops_api.hxllm/core/kernels/cuda/xattention/beam_search.cppxllm/core/kernels/cuda/xattention/cache_select.cu
这一层适合回答 3 个问题:
- Attention 的稳定执行路径到底落在哪
- Beam Search 为什么不只是调度问题,而是 kernel 热路径问题
- beam 重排之后的 cache select 为什么必须和前面的执行形态一起考虑
也就是说,技术分享如果要把 fixed_steps_scheduler、multi_step_pipeline、xAttention 和 beam search 串成一条线,最终一定会落到这里。
8.7 推荐的代码阅读顺序
Section titled “8.7 推荐的代码阅读顺序”如果后续你或者其他同学还要继续扩写这篇文档,我建议代码阅读顺序固定成下面这样:
入口 -> api_service -> RecMaster -> FixedStepsScheduler -> RecEngine -> RecBatchInputBuilder / RecMultiRoundBatchInputBuilder -> RecWorkerImpl::LlmRecMultiRoundPipeline -> xAttention / beam_search / cache_select这个顺序的好处是:
- 先看“请求怎么进来”
- 再看“为什么 fixed step”
- 再看“multi-step 是怎么在设备侧成立的”
- 最后看“定制算子为什么在这里有价值”
这样逻辑最顺,也最适合技术分享展开。
9. 关键代码锚点索引
Section titled “9. 关键代码锚点索引”如果后续需要继续写技术分享、补代码注释,或者在评审时快速证明文档里的说法来自当前分支实现,可以直接从下面这组锚点入手。
9.1 入口与服务层锚点
Section titled “9.1 入口与服务层锚点”xllm/core/distributed_runtime/rec_master.cpp:575RecMaster::handle_request(...)- 对应 prompt / prompt_tokens / input_tensors 入口
xllm/core/distributed_runtime/rec_master.cpp:603RecMaster::handle_request(...)- 对应 chat messages 入口
xllm/core/distributed_runtime/rec_master.cpp:651RecMaster::handle_request(const std::vector<int>& prompt_tokens, ...)- 对应 token / raw input 类入口
这些锚点适合回答一个问题:REC 请求到底是怎么被收敛到 RecMaster 里的。
9.2 调度层锚点
Section titled “9.2 调度层锚点”xllm/core/scheduler/fixed_steps_scheduler.cpp:337FixedStepsScheduler::step(const absl::Duration& timeout)- 这是 fixed-step 调度真正往前推进的一步
xllm/core/scheduler/fixed_steps_scheduler.cpp:186FixedStepsScheduler::prepare_batch()- 适合解释当前 batch 是怎么在固定步场景下被组织的
xllm/core/framework/batch/rec_batch_input_builder.cpp:29RecBatchInputBuilder::create(...)- 适合解释 builder 是如何按
RecType和 multi-round 模式切换的
这几处放在一起,可以直接支持“fixed_steps_scheduler 不是概念,而是代码主链里的真实选择”这一点。
9.3 引擎与多轮执行锚点
Section titled “9.3 引擎与多轮执行锚点”xllm/core/distributed_runtime/rec_engine.cpp:901RecEngine::RecMultiRoundEnginePipeline::step(...)- 说明 engine 层如何把执行进一步下沉到 multi-round pipeline
xllm/core/runtime/rec_worker_impl.cpp:849RecWorkerImpl::LlmRecMultiRoundPipeline::step(...)- 这是最关键的一段,真正体现多轮 decode 循环在设备侧发生
xllm/core/runtime/rec_worker_impl.cpp:1011xllm::kernel::cuda::beam_search(...)调用点
xllm/core/runtime/rec_worker_impl.cpp:1066xllm::kernel::cuda::cache_select(...)调用点
如果你需要在分享中明确“beam search 和 cache select 不是调度层概念,而是直接落到 device 热路径上的实现”,这一组锚点最适合引用。
9.4 这组锚点怎么用
Section titled “9.4 这组锚点怎么用”这组锚点不需要在正文中全部展开,但非常适合作为:
- 技术分享讲稿里的“代码证据页”
- PR 说明里的“关键实现位置”
- 后续 reviewer 问“这句话代码在哪”的快速答复
如果后续还要继续扩写文档,建议优先围绕这几处函数补更细的输入输出说明,而不是再扩展泛化描述。
10. 推荐讲解顺序与阅读策略
Section titled “10. 推荐讲解顺序与阅读策略”前面的“代码路径附录”和“关键代码锚点索引”更像是资料库,适合在需要时回查;但如果这篇文档要真正变成一场技术分享的底稿,还需要一条更偏“讲述顺序”的线索。下面给出一个更适合对外讲的展开顺序。
10.1 推荐的讲解顺序
Section titled “10.1 推荐的讲解顺序”如果听众并不直接参与 backend=rec 的实现,建议不要一上来就讲 RecWorkerImpl 或 beam_search.cpp,而是按下面的顺序推进:
-
先讲业务目标
- 为什么生成式推荐和通用 LLM 推理的目标不一样
- 为什么这里更关注“整次请求的总时延”和“固定几轮的候选比较”
-
再讲调度选择
- 为什么
fixed_steps_scheduler更适合这个 workload - 为什么大
beam_width会让固定调度比连续调度更划算
- 为什么
-
然后讲执行方式
multi_step_pipeline为什么可以把多轮 decode 控制下沉到设备侧- 为什么这样可以减少 host 往返和控制开销
-
再讲定制算子
- 为什么执行形态稳定之后,
xAttention和beam search优化才真正值得做 - 为什么这两类优化要放在一节里讲,而不是拆成孤立话题
- 为什么执行形态稳定之后,
-
最后回到代码
- 再用代码主链和锚点证明前面的结论,不让整场分享停留在概念层
这个顺序的好处是:听众先理解“为什么”,再理解“怎么做”,最后再看“代码在哪里”。这比一开始就从实现文件名切入更容易跟上。
10.2 如果是内部走读,顺序可以反过来
Section titled “10.2 如果是内部走读,顺序可以反过来”如果听众本身就是 xLLM 或推荐基础设施相关同学,那么也可以采用另一条顺序:
- 先看
RecMaster -> FixedStepsScheduler -> RecEngine - 再看
RecBatchInputBuilder - 再看
RecWorkerImpl::LlmRecMultiRoundPipeline - 最后看
xAttention / beam_search / cache_select
这种讲法更适合代码走读,因为它直接沿着调用栈往下走。但它的缺点是,对没有上下文的听众来说,一开始就会掉进实现细节里,不容易先抓住设计选择背后的动机。
10.3 建议在分享中强调的 3 个结论
Section titled “10.3 建议在分享中强调的 3 个结论”如果后续要把这篇文档压缩成 10 分钟技术分享,我建议把整篇内容收束成下面 3 句话:
fixed_steps_scheduler解决的是调度稳定性问题;multi_step_pipeline解决的是多轮执行效率问题;xAttention和beam search定制算子是在执行形态稳定之后,进一步兑现性能收益的关键路径优化。
这三句话是整篇文档最值得被记住的部分,后面的代码链路和锚点都可以理解为是在为这三句结论提供证据。
11. 与通用 LLM 推理路径的对照
Section titled “11. 与通用 LLM 推理路径的对照”为了避免把 backend=rec 看成“只是把 LLM 推理拿来改一改”,这里把它和通用 LLM 推理的主路径做一个更明确的对照。
11.1 优化目标不同
Section titled “11.1 优化目标不同”通用 LLM 推理更强调逐 token 的生成体验,例如尽快返回第一个结果、尽量缩短 token 间隔,并让新的请求尽快插入执行。
而 backend=rec 更强调固定轮数内的候选扩展与比较,因此更关注整次请求的总时延,而不是单条序列的最早结束时间。
这意味着两者虽然都在做 decode,但优化目标已经发生了偏移:
- 通用 LLM 推理更偏“动态请求管理”
- 生成式推荐更偏“固定窗口内的同步推进”
11.2 调度重点不同
Section titled “11.2 调度重点不同”在通用 LLM 推理里,连续调度的价值来自于:
- 某些序列提前结束后可以立刻让位;
- batch 可以被持续重组;
- decode 路径中动态插入和动态退出是高频动作。
而在 backend=rec 里:
- decode 轮数更固定;
beam_width更大;- 同一个 request 的多个候选需要在同一步比较;
- 频繁重排 batch 反而会放大调度成本。
所以,通用 LLM 推理的调度器重点是“灵活”,而生成式推荐的调度器重点是“稳定”。
11.3 执行方式不同
Section titled “11.3 执行方式不同”通用 LLM 推理常常允许 host 在每一步都继续参与调度、结束判断和下一轮输入准备。
而生成式推荐因为轮数固定、候选同步推进,所以更适合在第一步时就把后续几步所需的结构准备好,再让 device 侧连续推进。
这也是为什么 multi_step_pipeline 对推荐场景更有价值:它不是简单减少几个 memcpy,而是把原本“每一步都回来问一下 host”的控制模式,替换成“尽量在设备侧连续完成多轮”的模式。
11.4 算子收益兑现方式不同
Section titled “11.4 算子收益兑现方式不同”通用 LLM 推理里,算子优化往往直接服务于单步 decode 或通用 attention 路径。
而在 backend=rec 中,算子优化的价值高度依赖执行形态是否已经稳定下来。
如果固定调度没有成立,batch 还在频繁重组;如果 multi-step pipeline 没有成立,host 还在反复介入,那么很多算子级优化都会被额外的数据搬运和控制开销抵消掉。
因此,在推荐场景里更合理的顺序是:
- 先把调度稳定下来;
- 再把多轮执行尽量下沉到设备侧;
- 最后才围绕真正稳定的热路径做
xAttention、beam search、cache_select这类优化。
11.5 设计边界与适用条件
Section titled “11.5 设计边界与适用条件”上面的对照并不是为了强调“生成式推荐和通用 LLM 推理完全不同”,而是为了明确哪些设计可以直接复用通用推理框架,哪些设计必须围绕 backend=rec 的 workload 特征单独处理。
从当前分析看,fixed_steps_scheduler、multi_step_pipeline、xAttention 和 beam search 这四部分之所以需要被放在一起讨论,本质原因是它们依赖同一组前提条件:
- 输出长度固定或近似固定;
- decode 轮数较少,但单轮计算成本高;
- 同一请求下需要维护较大的
beam_width; - 候选扩展和候选比较是主路径,而不是附属逻辑;
- 设备侧状态可以提前组织,并在后续轮次中稳定复用。
只有在这些条件同时成立时,固定调度和整图执行的收益才会比较稳定。如果离开这些条件,例如请求长度差异极大、序列可能随时提前结束、或者新请求接入时延比吞吐更重要,那么 backend=rec 当前这套设计就不一定仍然是最优选择。
进一步看,这四部分之间并不是并列关系,而是逐层依赖关系。
第一层是 fixed_steps_scheduler。它解决的是调度入口的稳定性问题。如果调度层仍然每一步都在重组 batch、裁剪 sequence、回收空位,那么后面执行层的稳定性基础就不存在。
第二层是 multi_step_pipeline。它解决的是执行过程的连续性问题。只有在调度窗口已经稳定之后,才有意义进一步把多轮 decode 的输入准备、KV 组织和轮次推进尽量下沉到 device 侧。
第三层是 xAttention。它解决的是 attention 在生成式推荐场景下的显存与访存问题。只有在执行过程已经相对稳定之后,shared KV 与 unshared KV 的拆分、分段 attention 和流水线计算才会稳定兑现收益。
第四层是 beam search 优化。它解决的是大候选池下的搜索与筛选成本问题。由于 beam 相关逻辑会直接影响 decode 阶段的主路径,因此它必须和前面三层设计一起考虑,而不能独立看成一个后处理模块。
因此,这里真正想说明的是:当前分支中的这套设计不是四个离散优化点,而是一套围绕生成式推荐 workload 逐层收敛出来的组合方案。调度先稳定,执行再连续,算子最后吃收益。如果顺序反过来,很多优化很可能在系统层被额外开销抵消。
11.6 不适用或收益有限的场景
Section titled “11.6 不适用或收益有限的场景”为了避免把当前方案理解成“生成式推荐的统一答案”,还需要明确它的边界。
第一类是不适合固定调度的场景。比如请求长度波动极大、序列经常提前结束、或者系统更关心新请求的最短接入延迟而不是整批吞吐。在这种情况下,连续调度的灵活性可能更重要,固定窗口反而会放大等待成本。
第二类是不适合整图执行的场景。比如每一轮都必须由 host 做强控制决策,或者每一轮的 shape、batch 结构、关键输入变化都非常剧烈。这类场景下,multi_step_pipeline 很难把多轮控制稳定地下沉到 device 侧,整图执行也就不容易获得稳定收益。
第三类是算子侧收益不明显的场景。如果 beam 不大、候选扩展成本不高、或者 shared prefix 不长,那么 xAttention 和 beam search 相关优化虽然依然成立,但其工程收益可能不会像典型生成式推荐场景那样突出。
从技术文档角度,把这些边界写清楚有两个好处:一是避免读者误以为这套方案无条件普适;二是让后续 reviewer 在看实现时能更明确地区分“设计前提”与“实现缺陷”。
12. 验证与验收建议
Section titled “12. 验证与验收建议”这一节的验证不应只停留在“文档能不能打开”,而应该和前文所描述的设计目标直接对应。换句话说,验证要回答的问题是:当前分支中的实现,是否真的支持文档里所描述的这套设计。
12.1 文档层验证
Section titled “12.1 文档层验证”最基础的验证仍然需要保留:
- 中文与英文设计文档能够正常渲染;
- 所有图片引用都能正确解析到
docs/assets/; - 英文文档引用的是英文版示意图,而不是中文标注图片;
- 入口页和相关 feature 文档能够导航到这篇设计文档。
这一层验证的意义,是保证文档本身可以被正常消费。
12.2 代码路径一致性验证
Section titled “12.2 代码路径一致性验证”第二层验证,是确认文档中提到的关键路径在当前分支中确实存在,并且角色描述与实际实现一致。这里建议至少对以下路径做静态核对:
RecMaster是否确实承担 request 收敛与 pipeline 选择;FixedStepsScheduler是否确实是backend=rec的固定调度入口;RecEngine是否承担 engine 层执行组织;RecWorkerImpl::LlmRecMultiRoundPipeline是否确实承担多轮 device 侧执行;xAttention、beam_search、cache_select的 kernel 路径是否与文档描述一致。
这一层验证的目的,是避免文档讲的是“理想结构”,而代码里其实已经偏离。
12.3 设计目标对应的验证项
Section titled “12.3 设计目标对应的验证项”如果要进一步把这篇文档作为技术分享和实现说明的统一底稿,建议把验证项和设计目标一一对应起来。
针对固定调度,建议关注:
- decode 过程中 batch 是否仍频繁重组;
- beam 相关 sequence 是否仍在每轮发生大量裁剪和搬移;
- 调度开销是否在 profile 中被压低。
针对 multi_step_pipeline,建议关注:
- host 是否仍在每一轮都做终止判断;
- 下一轮输入是否已经可以在当前轮计算期间准备;
D2H/H2D往返是否相比逐轮控制路径有所下降。
针对 xAttention,建议关注:
- shared KV 是否真的只保留一份物理存储;
- unshared KV 是否只承载 decode 产生的新 token;
- 是否减少了 shared prefix 的重复加载。
针对 beam search,建议关注:
- 大
beam_width场景下排序和过滤是否仍然占主成本; - 相关数据结构是否可以跨轮复用;
- item 过滤和候选筛选是否已经与 decode 主链有效衔接。
12.4 最终验收标准
Section titled “12.4 最终验收标准”如果把这篇文档作为当前分支生成式推荐设计的验收基线,那么最终至少应满足以下标准:
- 文档层面:中英文可读、引用完整、导航可达;
- 结构层面:调度、执行、算子三层关系讲清楚;
- 代码层面:关键路径、关键函数、关键文件能对上;
- 设计层面:适用条件、边界条件和主要取舍写清楚;
- 分享层面:读者能够从文档中直接抽出讲稿主线,而不需要再次重构逻辑。
只有同时满足这几类条件,这篇文档才不只是“说明写过了”,而是真正能作为设计、分享、review 三者共用的稳定底稿。
13. FAQ / 常见误解
Section titled “13. FAQ / 常见误解”Q1: 固定步调度是不是一定比连续调度更好?
Section titled “Q1: 固定步调度是不是一定比连续调度更好?”不是。固定步调度之所以在 backend=rec 场景更合适,是因为这里的 decode 轮数更固定、beam_width 更大、候选比较更同步。如果这些前提不成立,连续调度的灵活性可能更有价值。
Q2: multi_step_pipeline 是不是只是少做几次 memcpy?
Section titled “Q2: multi_step_pipeline 是不是只是少做几次 memcpy?”不是。减少 D2H/H2D 往返只是表面收益。更关键的是,它改变了控制方式:从“每一步都依赖 host 回来做决策”,变成“尽量在 device 侧连续推进多轮执行”。
Q3: xAttention 和 beam search 为什么要放在同一节?
Section titled “Q3: xAttention 和 beam search 为什么要放在同一节?”因为它们都依赖同一件事:执行形态已经稳定。如果调度还在频繁重组 batch、host 还在每一步强介入,那么不管是 attention 优化还是 beam search 优化,都会被系统层额外开销稀释。
Q4: 这套设计是不是只适用于 OneRec?
Section titled “Q4: 这套设计是不是只适用于 OneRec?”不是。当前文档以生成式推荐场景为主线,重点落在 backend=rec 的固定步和多轮执行特征上。OneRec 是重要例子,但重点不是某个具体模型名,而是这类 workload 的服务特征。
Q5: 为什么文档里反复强调“先稳定调度,再优化算子”?
Section titled “Q5: 为什么文档里反复强调“先稳定调度,再优化算子”?”因为在系统设计里,顺序很重要。如果调度入口不稳定,batch 形态不稳定,执行过程也不能稳定地下沉到设备侧,那么算子级优化很难持续兑现收益。只有调度和执行先稳定,算子优化才不会被反复的数据搬运和控制开销抵消。
14. 接口与数据契约
Section titled “14. 接口与数据契约”如果这篇文档要继续作为实现和评审的基础材料,仅靠“原理解释”还不够,还需要把一些关键接口和数据契约明确写出来。这里不追求覆盖所有字段,而是把最影响实现正确性的部分固定下来。
14.1 外部入口的输入形态
Section titled “14.1 外部入口的输入形态”当前 backend=rec 至少存在三类外部输入形态:
- 文本 prompt 入口
- 适用于 prompt 驱动的推荐请求
- 最终会被收敛到
RecMaster::handle_request(...)
- token / raw 输入入口
- 适用于已经完成 tokenizer 处理或外部直接传 token 序列的场景
- 也可能带有 embedding 或索引信息
- chat 入口
- 适用于对话式 recommendation 场景
- 在服务层最终仍然会落回
RecMaster
从设计角度看,这里最重要的并不是“有多少入口”,而是:所有入口最终都要收敛到统一 request state 和统一 scheduler / engine / worker 主链中。
14.2 与 multi-round 直接相关的关键数据
Section titled “14.2 与 multi-round 直接相关的关键数据”对 backend=rec 来说,下面几类数据是关键契约:
beam_width- 决定每轮保留多少候选分支
top_k- 决定每轮每个分支扩展多少候选
decode_step/total_round- 决定固定轮数和整图执行边界
decode_positions- 决定每一轮 token 的位置组织方式
- shared / unshared KV
- 决定 decode 阶段 KV cache 如何拆分和复用
如果这些数据没有被提前组织好,那么 fixed-step 和 multi-step 的收益就无法稳定落地。
14.3 文档层应该长期保持的不变量
Section titled “14.3 文档层应该长期保持的不变量”后续如果继续扩写这篇文档,我建议至少保持下面几条不变量:
- 文档里一旦提到 fixed-step,就必须同时交代 fixed-step 的边界条件;
- 文档里一旦提到 multi-step,就必须说明 host 侧减少了哪些职责;
- 文档里一旦提到
xAttention,就必须解释它和 KV 组织之间的关系; - 文档里一旦提到
beam search,就不能只讲算法,还要讲它的系统成本; - 文档里的代码锚点必须能在当前分支对上,不能引用未来规划路径。
15. 实现对齐表
Section titled “15. 实现对齐表”为了避免读者把“设计意图”和“当前分支已经落地的能力”混在一起,这里给出一个简化的实现对齐表。它不是精确到每个 helper 的状态表,而是当前文档里最重要的设计项对齐结果。
15.1 已有实现
Section titled “15.1 已有实现”- 固定调度
- 当前分支已有
FixedStepsScheduler - 可以作为固定窗口调度的代码事实依据
- 当前分支已有
- multi-round 执行主链
- 当前分支已有
RecMultiRoundEnginePipeline - worker 侧已有
LlmRecMultiRoundPipeline
- 当前分支已有
- beam search 热路径
- 当前分支已有 beam search 相关调用与 kernel 路径
- cache select 热路径
- 当前分支已有 cache select 调用和对应 CUDA 路径
- xAttention / flashinfer 路径
- 当前分支已有对应实现文件和调用链
15.2 当前文档里仍然属于“设计抽象”的部分
Section titled “15.2 当前文档里仍然属于“设计抽象”的部分”xAttention、beam search、fixed-step、multi-step 之间的收益关系- 当前文档做了归纳
- 但它们不是某个单一类或单一模块的名字
- 多流缓解等待的整体收益
- 当前代码里有并发 pipeline 与 stream 的基础设施
- 但文档里的收益分析仍属于系统层抽象,不是单个类能直接表达的事实
15.3 为什么实现对齐表值得单独写
Section titled “15.3 为什么实现对齐表值得单独写”这一节的作用,是避免 reviewer 或听众把“文档里讲得通”误以为“当前分支里一定已经逐项完全实现”。
实现对齐表能让后续讨论更聚焦:哪些内容是已经可以拿代码证明的,哪些内容是当前设计的系统层解释。
16. 失败模式与可观测性
Section titled “16. 失败模式与可观测性”如果这篇文档只讲“正常路径”,那它仍然更像分享稿,而不是技术文档。在线系统一定要考虑失败模式与观测手段,因此这里补一个最小版本。
16.1 典型失败模式
Section titled “16.1 典型失败模式”- 等待时间变长
- fixed-step 窗口导致新请求排队时间增加
- beam 过大导致 decode 成本过高
- 候选扩展、排序与过滤成本放大
- shared/unshared KV 组织不正确
- 导致显存浪费、重复读取或错误的 cache 选择
- host 参与过多
- 使 multi-step 的收益被冲掉
- 算子热路径收益不明显
- 说明调度和执行形态还不够稳定
16.2 最值得观察的指标
Section titled “16.2 最值得观察的指标”即便不展开完整监控系统,这篇文档也至少应该把观察点写清楚:
- 请求总时延
- 不同 decode round 的耗时分布
- scheduler 相关开销占比
- host-device 往返次数或同步点
- beam search / cache select 在总耗时中的占比
- 显存占用和碎片化趋势
16.3 排障时最短路径
Section titled “16.3 排障时最短路径”如果线上效果和预期不一致,建议优先按下面顺序排:
- 先确认请求是不是确实符合 fixed-step 场景假设;
- 再确认 decode 主链是否真的走到了 multi-round pipeline;
- 再看 beam search 和 cache select 是否成为主成本;
- 最后再看 xAttention / KV 组织是否真的减少了重复加载和拷贝。
17. 基准与验收协议
Section titled “17. 基准与验收协议”为了让这篇文档后续更容易被用作评审和验收依据,这里补一个轻量的基准与验收协议模板。
17.1 建议至少覆盖的 workload
Section titled “17.1 建议至少覆盖的 workload”- 长输入 / 短输出
- 典型生成式推荐主场景
- 不同 beam_width
- 例如中等 beam 和大 beam 两组
- 不同 top_k
- 用于观察搜索和过滤成本的放大趋势
17.2 建议至少对比的指标
Section titled “17.2 建议至少对比的指标”- 吞吐
- P50 / P95 / P99 时延
- 不同 decode round 的耗时
- scheduler 开销占比
- host 参与开销
- 显存峰值
17.3 验收关注点
Section titled “17.3 验收关注点”- fixed-step 是否真的降低了调度扰动
- multi-step 是否真的降低了 host 回合控制开销
xAttention是否真的改善了 shared prefix 的重复访问- beam 相关优化是否真的降低了搜索与过滤开销
这部分内容的价值在于:它能把“这套设计听起来合理”进一步收敛为“这套设计应该如何被验证”。
18. 关键参数与建议范围
Section titled “18. 关键参数与建议范围”为了避免这篇文档停留在抽象讨论层面,最后补一个轻量但实用的参数章节。这里不追求给出唯一正确的数值,而是整理出后续继续调优时最值得关注的参数范围和影响方向。
18.1 beam_width
Section titled “18.1 beam_width”beam_width 决定每一轮保留的候选分支数,是生成式推荐 decode 成本最敏感的参数之一。
beam_width偏小:- 搜索成本低
- 候选覆盖较弱
- 更容易得到较低时延
beam_width偏大:- 候选覆盖更强
- 排序、过滤、cache select 成本会明显上升
- fixed-step 和 multi-step 的收益会更突出,但同时更容易放大 decode 侧主成本
因此,beam_width 不是简单的“越大越好”或“越小越快”,而是推荐质量、时延和系统开销之间的核心平衡点。
18.2 top_k
Section titled “18.2 top_k”top_k 决定每个 beam 在一轮中扩展多少候选。
在大候选池场景下,top_k 增长会直接放大:
- 排序工作量
- 无效 item 路径过滤工作量
- 候选集合的中间态管理成本
如果 top_k 设计得过大,而 item 过滤又不够早,那么会导致很多计算都浪费在最终不会进入下一轮的候选上。
18.3 decode 轮数
Section titled “18.3 decode 轮数”decode 轮数越固定,fixed-step 调度和 multi-step 执行就越容易稳定发挥作用。
如果 decode 轮数稳定在较小范围内,那么:
- 设备侧更容易提前分配相关结构;
step_meta更容易保持稳定;- 整图执行的收益更容易兑现。
反过来,如果 decode 轮数本身开始变得不稳定,那么 fixed-step 和 multi-step 的设计前提就会被削弱。
18.4 多流并发数量
Section titled “18.4 多流并发数量”多流不是越多越好。流数量过少,不能有效缓解等待;流数量过多,又可能带来新的调度竞争、资源抢占和额外管理开销。
因此,比较合理的调优方式通常是:
- 先确认 fixed-step 是否已经稳定;
- 再评估 host 侧等待和排队问题是否明显;
- 最后再增加多流或多执行 pipeline 数量。
18.5 参数调优的顺序建议
Section titled “18.5 参数调优的顺序建议”如果后续要继续做性能调优,建议按下面顺序看参数:
- 先看 decode 轮数是否稳定;
- 再看
beam_width是否合理; - 再看
top_k是否过大; - 最后再看多流并发和系统层 overlap 是否足够。
这个顺序的原因是:前两个参数决定的是 workload 形状,后两个参数更多是在既定 workload 上做系统优化。
19. 参考资料
Section titled “19. 参考资料”这篇文档尽量立足当前分支实现,但一些背景问题、调度思路和 memory / graph 执行语境,本身就来自公开资料和已有模型实践。后续如果要继续扩写,可以优先参考下面这些公开资料。
19.1 调度与服务系统
Section titled “19.1 调度与服务系统”- Orca: A Distributed Serving System for Transformer-Based Generative Models
- 用于理解 continuous batching 的问题背景
- 适合作为 fixed-step 对照材料
19.2 显存与 KV Cache
Section titled “19.2 显存与 KV Cache”- Efficient Memory Management for Large Language Model Serving with PagedAttention
- 用于理解 block-based KV 管理的常见问题
- 适合作为 shared/unshared KV 设计的对照背景
19.3 生成式推荐模型
Section titled “19.3 生成式推荐模型”- OneRec
- 用于理解生成式召回模型的结构特点
- OneTrans
- 用于理解生成式精排模型的结构特点
19.4 图执行与多步执行
Section titled “19.4 图执行与多步执行”- 仓库内已有
Graph Mode设计文档- 适合理解 graph capture / replay、参数化和 Piecewise Graph
- 当前生成式推荐设计文档
- 更适合理解 fixed-step、多轮 decode、beam search 和 xAttention 在推荐场景里的组合关系
19.5 使用建议
Section titled “19.5 使用建议”如果后续还要继续扩写这篇文档,我建议:
- 需要写调度背景时,先看 Orca;
- 需要写 KV / memory 组织问题时,先看 PagedAttention;
- 需要写推荐模型结构时,先回到 OneRec / OneTrans;
- 需要写当前分支落点时,再回到本文档和代码锚点。
这样能保证文档继续变厚时,内容来源清楚,而且不会变成无边界的泛化解释。