Graph Mode 设计文档
xLLM 的 Graph Mode 覆盖多种图执行后端。其目标是在推理服务场景中,将原本由 Host 频繁发起的小粒度 kernel 启动,转化为先捕获、后重放的图执行流程,从而降低 Host 调度开销、减少设备气泡,并提升吞吐和时延稳定性。
本文档面向需要理解实现原理和关键设计的开发者,重点介绍以下内容:
- Graph Mode 的原理与在 xLLM 中的落地方式
- 动态维度参数化
- Piecewise Graph
- 多 Shape 复用的显存池(含输入 Tensor 复用)
本文聚焦 Graph Mode 的统一设计,不展开不同后端之间的差异。
本文档的设计目标包括:
- 统一 xLLM 在不同图执行后端上的 Graph Mode 抽象
- 解释动态维度参数化、Piecewise Graph 与多 Shape 显存复用三项关键设计
- 说明这些设计分别解决什么问题、依赖什么前提、边界在哪里
本文档的非目标包括:
- 不覆盖所有算子或所有模型的适配细节
- 不替代功能文档中的参数说明与使用示例
相关设计文档:
- 若希望看一个更偏业务推理场景、并且聚焦固定调度、多步执行和定制算子的案例,可参考:生成式推荐设计文档
1. Graph Mode 原理和在 xLLM 中的落地
Section titled “1. Graph Mode 原理和在 xLLM 中的落地”1.1 Graph Capture / Replay 的基本原理
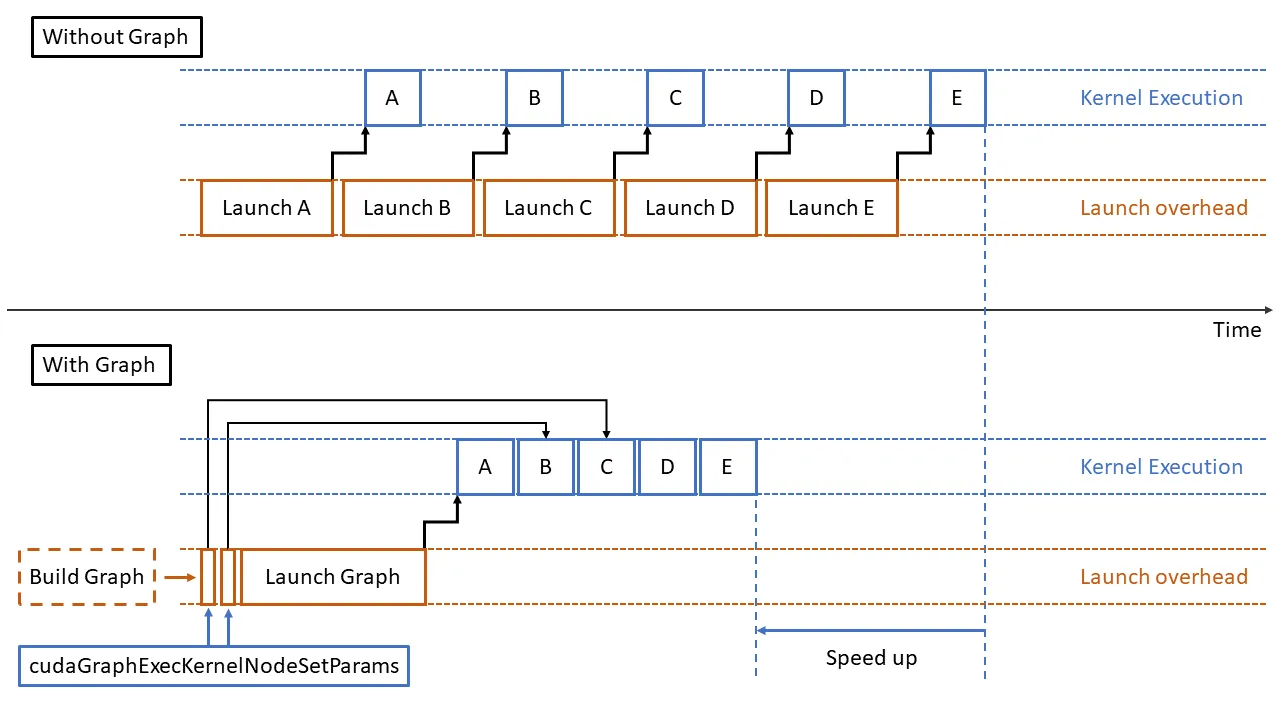
Section titled “1.1 Graph Capture / Replay 的基本原理”传统 eager 执行模式下,模型一次 forward 会由 Host 连续发起大量 kernel、memcpy 和同步操作。对于 decode 这类单 step 计算较小但请求频繁的场景,Host 调度开销会比较显著,设备端也更容易出现执行气泡。
Graph Mode 的基本思路是:
- Capture 阶段:第一次遇到某个 shape bucket 时,在专用 stream 上执行一次 forward,并把这条执行路径上的 kernel 启动、内存操作和依赖关系记录成图。
- Replay 阶段:后续相同 bucket 的请求,不再由 Host 逐个下发 kernel,而是直接重放已捕获的图。
这类机制通常要求:
- 执行路径稳定
- graph capture 记录的是一次具体执行路径;capture 完成后,这条路径上的控制流、launch 形态和依赖关系就被固化下来
- 因此,capture 路径中无法在 replay 时再切换到另一套动态条件分支
- 关键 Tensor 地址稳定
- capture 期间写入图中的关键 Tensor 地址,在 replay 时必须仍然可用
- 算子与结果语义稳定
- replay 的正确性依赖路径上的算子与 Graph Mode 兼容,且不会因为运行时条件变化而改变语义
1.2 xLLM GraphMode 基础工作
Section titled “1.2 xLLM GraphMode 基础工作”从 1.1 的三条基本要求出发,前两项主要由 xLLM 运行时负责:一是把动态请求整理成可稳定 replay 的执行单元,二是保证 replay 时仍然访问 capture 阶段记录下来的固定地址。为此,xLLM 在 Graph Mode 下引入了统一的 Graph Executor,负责收敛分桶、持久化 buffer、graph cache 以及 capture / replay 生命周期管理。
xLLM 在运行时侧需要完成的基础工作,主要包括:
- 围绕执行路径稳定的图选择与执行调度
- 请求需要先按
num_tokens或相近 shape 归入 bucket - bucket 维度维护 graph cache:已命中则直接 replay,未命中则先 capture 再缓存
- 对可整图捕获的路径执行完整图;存在 break graph 的路径则切换到 Piecewise Graph
- 请求需要先按
- 围绕地址稳定的持久化 buffer 与 graph instance 管理
- tokens、positions、seq_lens、block_tables 等动态输入不能在 replay 前重新分配到任意新地址, xLLM 需要先把这些输入写入持久化 buffer,再在固定地址上更新内容
- 模型计算图过程临时分配的Tensor都需要持久化保存对对应的graph instance中,不能随着作用域结束触发Tensor回收
- 启用共享内存池后,不同 shape 的 capture 可以复用同一组底层物理内存,但 graph 看到的虚拟地址仍需保持稳定
- 统一的 Graph Executor 封装
- capture、cache、replay、图实例管理以及后端差异屏蔽,都需要由运行时统一处理
- 这层封装的目的,是把 Graph Mode 的运行时组织逻辑从模型实现中剥离出来,而不是把它们散落到各个 layer 或算子里
在具体执行上,Graph Executor 的运行时流程可以概括为:
- 请求分桶:按
num_tokens或相近 shape 归类到 bucket - 输入准备:将 tokens、positions、seq_lens、block_tables 等写入持久化 buffer,并更新
attn_metadata、plan_info等动态元数据 - capture 或 replay 决策:bucket 已命中则直接 replay;未命中则先 capture、缓存图,再进入 replay 路径
- 执行图:按场景执行完整图或 Piecewise Graph
而 1.1 中第三项“算子与结果语义稳定”,更多落在模型和算子本身的适配上,见 1.3。
1.3 模型适配 Graph Mode 需要的改造
Section titled “1.3 模型适配 Graph Mode 需要的改造”在 xLLM 运行时负责分桶、buffer 和 graph instance 管理之后,模型侧仍然需要解决 1.1 中第三项要求:保证 capture / replay 期间的算子行为与结果语义稳定,不会因为 host 参与、dispatch 变化或 launch 形态变化而失效。
模型适配 Graph Mode 需要的改造主要包括:
- 去掉不支持 capture 的操作
Tensor a;Tensor b = a * 0.5; // 标量会被隐式传到 tensor 所在设备,产生同步 h2d
torch::Tensor max_of_seq = torch::max(input_params.kv_seq_lens);max_seq_len_ = std::max(max_of_seq.item<int>(), max_seq_len_); // host 读取 tensor- 算子适配
- 泛化要求:需要保证计算图的 kernel 执行路径稳定。对于同一个输入 shape,每次执行计算图选择的 kernel 应保持一致,不发生 prefill、chunked prefill、decode 混杂;同时
grid_dim、block_dim、task 数量、workspace 形态和 tiling 内容也不能变化 - 典型示例:Ascned Cann商发8.3版本 的 ATB PA 会根据序列长度和 batch size 实时决定是否启用 flash-decoding 长序列模式;长序列模式和短序列模式的 tiling key 不同,dispatch 后实际 launch 的
kernel_name也不同。这种“同一业务路径、不同运行时条件触发不同 kernel”的行为,在进入 Graph Mode 前需要先收敛
- 泛化要求:需要保证计算图的 kernel 执行路径稳定。对于同一个输入 shape,每次执行计算图选择的 kernel 应保持一致,不发生 prefill、chunked prefill、decode 混杂;同时
2. 动态维度参数化
Section titled “2. 动态维度参数化”2.1 问题
Section titled “2.1 问题”Graph Capture 记录的是固定的 kernel 执行序列和 launch 形态。Replay 时,运行时只能重复这套已经记录下来的 grid_dim、block_dim、task 数量和 tiling 路径,不能在同一张图里重新决定它们。
因此,请求里的动态维度进入 Graph Mode 后,并不都能在 replay 时继续变化。对 attention 来说,真实动态因素通常不止 num_tokens,还包括 batch_size、q_seq_lens、kv_seq_lens、block_tables_size 等。如果这些维度进一步影响 task 划分、workspace 布局、tiling_params 或 kernel 路径,那么 replay 就会沿用 capture 时的旧配置,从而出错。
本章要解决的问题就是:哪些动态信息可以在图选定后继续更新,哪些必须通过分桶或重新建图处理。
2.2 解法
Section titled “2.2 解法”动态维度参数化的解法,不是“让一张图接受任意 num_tokens”,而是在图已经按 bucket_num_tokens 选定之后,让同一个 bucket 尽量覆盖更多真实动态请求。
2.2.1 参数化边界
Section titled “2.2.1 参数化边界”一个维度能不能在 replay 时变化,关键不在于它是不是“请求里的动态值”,而在于它有没有在 capture 阶段被折叠进图的执行形态。
可以把动态因素分成两类:
-
决定图形态的维度
- 一旦进入
grid_dim、block_dim、task 数量、workspace 布局、tiling key 或tiling_params,它就成为 capture 结果的一部分 - 这类维度变化后,通常不能在同一张 graph 内直接修改
- 一旦进入
-
图选定后仍可更新的维度
- 例如
batch_size、q_seq_lens、kv_seq_lens、block_tables、new_cache_slots、plan_info - 它们只有在不改写执行形态时,才适合作为参数化对象
- 例如
一个简化后的 norm kernel 例子是:
int grid_dim = num_tokens;NormKernel<<<grid_dim, block_dim>>>(x, y, ...);这里的 grid_dim、block_dim 都属于 launch params。只要 num_tokens 已经参与了 launch 配置,它就属于图形态的一部分;capture 完成后,replay 就不能在同一张图里把 grid_dim = 128 改成 grid_dim = 256。
因此,动态维度参数化的判断标准很直接:凡是会改变 launch、workspace 或 tiling 路径的动态因素,都不应只靠 replay 前改参数解决。
2.2.2 xLLM 中的处理方式
Section titled “2.2.2 xLLM 中的处理方式”xLLM 的处理方式分两层。
第一层先处理 num_tokens:通过 bucket 化和 padding,把原始请求归一化到固定的 bucket_num_tokens,再据此选定图。
第二层再处理 bucket 内剩余的动态信息:对依赖 host tensor、host planning 或 host 侧 tiling 的算子做改造,把真正随请求变化的信息放到设备侧持久化 buffer 中,或者显式外置为 replay 前可更新的数据,而不是让 replay 继续绑定 capture 时那次 host 侧 planning 结果。
以 NPU attention 为例,改造前常见的问题是:q_seq_lens、kv_seq_lens 先在 Host 侧参与 planning,生成 task、workspace 或 tiling 相关数据,再发射 kernel:
// Host sideauto plan_info = PlanAttention(q_seq_lens_host, kv_seq_lens_host, ...);WritePlanToWorkspace(attention_workspace, plan_info);
AttentionKernel<<<grid_dim, block_dim>>>( q, k, v, out, attention_workspace, tiling_params);这类实现里,graph replay 不会自动重做 planning,因此只能重复 capture 时那次 launch 和那次 workspace 布局。改造后的方向是,在固定 launch 形态下,把 q_seq_lens、kv_seq_lens、block_tables_size、plan_info 等动态信息写入设备侧持久化 buffer,再由 kernel 在执行时读取,例如kv_seq_lens的参数化示例:
struct AttentionLaunchArgs { void* q; void* k; void* v; void* out; int32_t batch_size; int32_t* kv_seq_lens; // device buffer void* attention_workspace; void* tiling_params;};
LaunchAttentionKernel(args);如果某个动态因素一旦变化就会改写任务数量、数组长度、workspace 形态或 tiling 路径,那么 xLLM 不会强行把它塞进“参数化更新”里,而是采用两种处理方式之一:
- 扩大分桶维度,把这些因素纳入选图键,例如
num_tokens和num_comm_tokens的组合 - 把这段对动态 shape 敏感的执行留在 full graph 之外,交给 Piecewise Graph 处理
2.3 结果
Section titled “2.3 结果”动态维度参数化的直接结果是:同一个 num_tokens bucket 可以安全覆盖更多真实请求;在执行形态稳定的前提下,attention 等算子也能在 replay 时看到正确的 batch_size、seq_lens、block_tables_size、plan_info 等动态信息。
需要注意的是,参数化并不等于取消分桶。num_tokens 的动态性仍主要通过选图吸收;如果同一个 bucket 下还有其他会改写 tiling key、任务数量、通信规模或 kernel 路径的因素,那么这些因素仍然必须进入分桶键,或者转为 Piecewise Graph。通信相关场景就是典型例子,例如 Attention DP + MoE EP 下,通信规模可能取决于最大 DP Data Size,而不完全等于单卡本地的 num_tokens。
3. Piecewise Graph
Section titled “3. Piecewise Graph”3.1 问题
Section titled “3.1 问题”在 prefill、chunked prefill 等场景中,整条 forward 路径往往比 decode 更复杂。某些算子可能:
- 无法被稳定 capture
- 对动态元数据高度敏感
- 在 capture 模式下依赖额外的运行时准备逻辑
如果要求“整图都必须可捕获”,Graph Mode 的适用范围会非常受限。只要有一个关键算子 break graph,整条路径都无法使用图执行。
3.2 解法
Section titled “3.2 解法”3.2.1 底层逻辑
Section titled “3.2.1 底层逻辑”在实现上,一个经常被问到的问题是:为什么 decode 可以使用 full graph,而 chunked prefill 往往只能使用 Piecewise Graph?
关键差别在 attention。
在当前 decode 语义下,单步通常是“每个序列生成一个 token”,因此 num_tokens 与 batch_size 基本是一一对应的。对 attention 来说,这意味着:
num_tokens增长时,batch_size也同步增长q_seq_lens的模式相对稳定- 任务划分、workspace 需求和 launch args 变化主要可以跟着
num_tokens一起分桶
因此,按 num_tokens 建 bucket 时,decode 路径满足 full graph 的复用条件。
但在 chunked prefill 中,num_tokens 和 batch_size 不再绑定。相同的 num_tokens,可能对应完全不同的请求组合,例如:
num_tokens = 128, batch_size = 2, q_seq_lens = [64, 64]num_tokens = 128, batch_size = 4, q_seq_lens = [32, 32, 32, 32]num_tokens = 128, batch_size = 8, q_seq_lens = [16, 16, 16, 16, 16, 16, 16, 16]
对 attention 算子来说,这些请求虽然 num_tokens 相同,但并不是同一种 shape。attention 的任务数量划分、本地索引、q_seq_lens / kv_seq_lens 的长度、以及对应的 plan_info 都和 batch_size 有直接关系。如果系统只按 num_tokens 去复用之前记录的 graph,那么 attention 在 replay 时就可能沿用 capture 阶段那套“旧的 batch 划分”和“旧的任务分块”,从而导致结果错误。
这里的 batch_size 之所以难以简单参数化,是因为它影响的不只是某个标量值,而是整组 launch args 的结构:
q_seq_lens/kv_seq_lens数组长度会变- attention 的任务数量和任务边界会变
plan_info和 workspace 布局会变- kernel 内部使用的索引和分块逻辑会变
换句话说,batch_size 在 chunked prefill 中不是“改几个参数就行”的维度,而是会改变 attention 这一段图的执行形态。除非把 num_tokens × batch_size 甚至更细粒度的 seq_lens 组合都纳入分桶,也就是做高维笛卡尔积建图,否则仅靠 num_tokens 选图并不安全。
这也是为什么当前实现更适合:
- decode:attention 可以随 full graph 一起捕获
- chunked prefill:attention 留在图外,其他稳定部分进入 Piecewise Graph
3.2.2 核心思路
Section titled “3.2.2 核心思路”Piecewise Graph 的目标不是强行整图捕获,而是把一条完整执行路径拆成多个 piece:
- 可图化的部分:捕获为多个子图
- 不适合图化的部分:保留为 eager 形式
在 replay 时,再按 capture 期间记录的顺序,把这些 piece 串起来执行。
这样可以在“无法整图”的前提下,尽量保留 Graph Mode 的收益。
下图以三层 Qwen3 decoder 为例展开了 Piecewise Graph 的执行顺序:attention 保留为独立 runner,而两次 attention 之间的非 attention 算子会被尽量压紧并组织成连续的 graph piece。

3.2.3 xLLM 中的实现方式
Section titled “3.2.3 xLLM 中的实现方式”在 xLLM 中,Piecewise Graph 主要用于 prefill 类场景,由 enable_prefill_piecewise_graph 控制。
它的核心实现方式是:
- 使用
PiecewiseGraphs维护 replay 指令序列 - 可捕获片段以图对象形式保存
- attention 这类不直接进入图的部分,通过
AttentionRunner记录为 runner - replay 时按原始顺序执行
graph -> runner -> graph -> ...
这套机制的关键点在于 attention 的处理:
- 在 piecewise capture 期间,attention 会暂时结束当前图捕获
- attention 本身不在 capture 时执行,而是把运行 attention 所需的张量、workspace 和参数保存下来
- replay 时,再基于最新的
plan_info、q_cu_seq_lens、kv_cu_seq_lens执行 attention
这样做的直接原因就是:chunked prefill 下 attention 的动态维度不只由 num_tokens 决定,而当前图分桶主要按 num_tokens 组织。把 attention 留在图外,才能避免“同样的 num_tokens 命中了 graph,但 batch_size 和 seq_lens 已经变了”的 replay 错误。
因此,Piecewise Graph 的本质不是“图内支持 attention 的所有动态逻辑”,而是:
- 让可稳定 capture 的部分进入图
- 让对动态 shape 更敏感的 attention 保持单独执行
- 通过统一指令序列保证整条执行路径顺序不变
3.3 结果
Section titled “3.3 结果”这套做法带来的结果和边界主要体现在以下几个方面。
3.3.1 适用场景
Section titled “3.3.1 适用场景”- prefill
- chunked prefill
- 局部 break graph,但整条路径仍希望获得图执行收益的场景
3.3.2 优点
Section titled “3.3.2 优点”- 比“整图要么全成功、要么全放弃”更灵活
- 能显著扩大 Graph Mode 的覆盖范围
- 适合 attention 动态性强、而 MLP 等部分较稳定的模型结构
3.3.3 限制
Section titled “3.3.3 限制”- 当前主要覆盖 prefill 类路径
- replay 依赖正确更新的
attn_metadata.plan_info
4. 多 Shape 复用的显存池
Section titled “4. 多 Shape 复用的显存池”4.1 问题
Section titled “4.1 问题”Graph Mode 在多 shape 场景下面临两个同时出现的问题:
-
捕获期显存随 shape 数量线性增长
- 每次新的 shape 进入 capture,运行时通常会为它分配独立的 memory buffer pool
- 由于图执行要求 capture 和 replay 之间地址稳定,这些缓冲区往往不能及时释放
- 结果是显存占用从期望的
max(shape)变成了sum(shape)
-
输入侧也会重复占用显存
- 如果每个 shape 都维护一套独立的 tokens、positions、seq_lens、block_tables 等输入 tensor
- 那么即使图本身可以复用,输入侧显存也会继续按 shape 累积
因此,多 Shape 复用显存池要解决的问题,不只是节省显存,而是要在支持动态新 shape 的同时,把显存行为从 sum(shape) 收敛到 max(shape)。
具体目标包括:
- 捕获期显存复用:不同 shape 的 graph 共享同一组底层物理内存
- 输入侧显存复用:不同 shape 的 replay 共享同一组持久化输入 buffer
- 地址不冲突:每个已捕获 graph 仍然保有自己稳定的虚拟地址视图
- 支持按需新建 shape:新 shape 出现时可以继续 capture,而不必推倒已缓存的 graph
- 不增加 replay 开销:内存复用主要发生在 capture 和输入准备阶段,replay 路径尽量保持不变
4.1.1 根本原因
Section titled “4.1.1 根本原因”- 以 CUDA 路径为例,allocator 往往会为每次 graph capture 分配独立的 memory buffer pool
- Graph Mode 又要求 capture 和 replay 之间地址稳定,因此旧 shape 对应的 buffer 不能像普通 eager 临时内存那样及时回收
- 当不同 shape 持续进入 capture 时,显存占用就会从期望的
max(shape)累积到sum(shape)
4.1.2 约束条件
Section titled “4.1.2 约束条件”- 不同 shape 的 graph 在当前前提下不会同时 replay
- 需要支持动态出现的新 shape,按需进行 capture
- 不希望为了新 shape 推倒已缓存 graph,或重新捕获已经可用的旧 shape
- replay 路径不希望因为显存复用而引入额外的图执行复杂度
4.1.3 失败方案与技术难点
Section titled “4.1.3 失败方案与技术难点”一个更直接的想法是:每次 capture 前重置分配指针,让不同 shape 复用同一段 virtual address space。
但这条路在工程上并不安全。allocator 通常按地址跟踪已经分配的 block;如果新 capture 复用了旧地址,就可能覆盖原来的地址记录。这样一来,旧 graph 后续在 tensor 析构或释放时,就可能遇到地址记录缺失,甚至触发 invalid device pointer 一类错误。
这也暴露了问题的关键:Graph Mode 真正需要稳定的是“每张 graph 看到的地址视图”,而真正需要复用的是“底层 physical memory”。因此,技术难点不只是节省显存,而是要同时满足:
- 已捕获 graph 的 virtual address space 彼此不冲突
- 底层 physical memory 又能在多 shape 之间共享
- 新 shape 进入 capture 时,不破坏已有 graph 的可 replay 性
4.2 解法
Section titled “4.2 解法”多 Shape 复用的底层思路,不是让不同 shape 共用同一段虚拟地址,而是让它们共享同一组物理内存,同时为每个已捕获 graph 保留独立的虚拟地址视图。
这样设计的原因是:如果强行让不同 shape 复用同一段虚拟地址空间,allocator 的地址跟踪会发生冲突,旧 graph 释放或析构时可能找不到原来的地址记录,最终导致错误。换句话说,真正需要复用的是底层物理显存,而不是 graph 看到的虚拟地址。
为了说明为什么 xLLM 选择“共享 physical memory + 独立 virtual address space”,可以把几种方案对比如下:
| 方案 | 内存复用机制 | 物理内存结果 | 地址冲突风险 / 规避方式 | 主要局限 |
|---|---|---|---|---|
| vLLM | 共享 graph memory pool + 大 shape 优先 capture | 可能继续接近 sum(shape) | 依赖共享 memory pool 和空闲块管理,通常无显式地址冲突 | 复用效果受捕获顺序和 allocator 行为影响 |
| SGLang | 全局 graph memory pool + 大 shape 优先 capture | 可能继续接近 sum(shape) | 依赖全局 pool / graph-private pools 管理规避冲突 | 不同 shape 较多时显存仍会继续增长 |
| xLLM | 多 virtual address space 映射同一组 physical memory | 收敛到 max(shape) | 每张 graph 保留独立地址视图,从根源避免地址记录冲突 | 依赖底层运行时提供 VMM 和 allocator 接入能力 |
xLLM 的选择不是复用同一段 virtual address space,而是让每个 graph 保留自己的地址视图,同时把真正可共享的部分下沉到底层 physical memory。
4.2.1 输入 Tensor 多 Shape 复用
Section titled “4.2.1 输入 Tensor 多 Shape 复用”xLLM 先解决输入侧显存重复占用的问题。做法是:不再为每个 shape 分配独立输入 tensor,而是预分配一组“最大 shape”对应的持久化 buffer,然后让不同 shape 共享这组 buffer。
这组 buffer 通常包括:
tokenspositionsq_seq_lenskv_seq_lensblock_tablesnew_cache_slotshidden_states
replay 前的处理方式也比较直接:
- 把当前请求的实际输入写入 buffer 前缀
- 必要时对 padding 区域补零
- 用 slice 视图构造当前 actual shape 的输入
这样做的结果是:输入侧显存不再按 shape 累加,而是稳定在一份 max(shape)。
4.2.2 捕获期显存复用
Section titled “4.2.2 捕获期显存复用”解决输入侧之后,还需要解决 graph capture 本身的显存累积问题。
xLLM 的核心做法是:
- 每次 capture 使用新的虚拟地址空间
- 不同虚拟地址空间映射到同一组物理内存
这样可以同时满足两件事:
- 对 graph 来说地址稳定:每个已捕获 graph 都看到自己的固定虚拟地址
- 对物理显存来说只保留一份:底层物理内存按最大需求扩张,不再按 shape 叠加
相比“复用同一虚拟地址”的思路,这种做法规避了地址跟踪冲突问题,因此更适合和现有 allocator 机制协作。
这套方案依赖统一的虚拟内存管理能力,核心操作包括:
- 保留一段新的虚拟地址空间
- 创建或扩张底层物理内存
- 将同一组物理内存映射到多个虚拟地址空间
- 在需要时执行 unmap、释放地址空间和访问权限设置
其中最关键的特性是:同一组物理内存可以同时映射到多个虚拟地址空间。这正是“不同 shape 的 graph 地址互不冲突,但底层物理显存仍然共享”的基础。
4.2.2.1 地址映射关系
Section titled “4.2.2.1 地址映射关系”Graph 捕获期显存复用的核心映射关系如下:

这张图表达的是:随着 shape 逐步增大,每次 capture 都切换到新的虚拟地址空间,但三个 virtual space 复用的是同一个 physical memory pool。不同 shape 只会使用其中不同比例的页,而底层物理显存总占用收敛到 max(shape)。
4.3 结果
Section titled “4.3 结果”4.3.1 内存效率指标
Section titled “4.3.1 内存效率指标”| 指标 | 显存不复用方案 | 显存复用方案 |
|---|---|---|
| 物理内存大小 | sum(shape) | max(shape) ✅ |
| 虚拟内存 | 多份 | 多份 |
| 稳定性 | 地址冲突风险 | 稳定 ✅ |
这里的关键变化是:物理显存收敛到 max(shape),而 virtual address space 仍会随着已捕获 shape 数量增长。
4.3.2 性能影响
Section titled “4.3.2 性能影响”- Capture 阶段:切换虚拟地址空间和扩张映射会带来额外开销
- Replay 阶段:无额外图执行开销,与常规 Graph Mode replay 基本一致
- 输入准备阶段:增加一次写入持久化 buffer 和 slice 视图构造,但这部分通常远小于重复分配带来的成本
4.3.3 虚拟地址空间开销
Section titled “4.3.3 虚拟地址空间开销”这套方案的主要代价之一,是 virtual address space 会随着已捕获 shape 数量持续增长。但这部分增长对应的是地址空间占用,而不是物理显存占用。
在 64 位系统下,virtual address space 通常远大于单卡显存规模,因此对当前这类 graph capture 场景来说,它通常不是首要瓶颈。换句话说,这套方案是用更充足的地址空间,换取物理显存从 sum(shape) 收敛到 max(shape)。
4.3.4 结果验证
Section titled “4.3.4 结果验证”- 不同 shape 的 capture 可以共享同一组底层 physical memory
- 每次 capture 仍保有独立的 virtual address space,而不是复用同一组地址视图
- 地址冲突类问题不再通过“复用同一虚拟地址”这条路径暴露出来
- 显存占用从按 shape 累积的
sum(shape)收敛到max(shape)
4.3.5 实际效果
Section titled “4.3.5 实际效果”- 多 shape 场景下,显存行为从“随 capture 次数线性累积”转为“物理显存按最大 shape 收敛”
- Graph 复用的稳定性提升,规避了直接复用同一虚拟地址空间带来的地址冲突问题
- 设计上支持动态新 shape 按需 capture,而不必推倒已有 graph 缓存
- replay 路径保持不变或基本不变,主要复杂度集中在 capture 和输入准备阶段
4.3.6 适用前提与边界
Section titled “4.3.6 适用前提与边界”- 虚拟地址空间会随着已捕获 shape 数量增长而增长,但物理显存只按最大需求扩张
- 方案依赖底层运行时提供虚拟地址空间管理、物理内存映射以及 allocator 接入能力
- 当前假设不同 shape 的 graph 不会同时 replay;正是这个前提让底层物理内存能够安全共享
- 当前实现仍以生命周期内统一持有物理内存和虚拟空间为主,不做细粒度动态释放